MPC变桨控制:OpenFAST与Simulink联合仿真探索
MPC变桨控制,OpenFAST与simlink联合仿真。 设计了多入多出线性MPC控制器。 5MW海上风机变桨控制仿真程序+参考文献 机型为OpenFAST 海上固定式单桩5MW风机
在风电领域,优化风机的控制策略对于提升发电效率、降低疲劳载荷至关重要。今天咱就来唠唠MPC变桨控制以及OpenFAST与Simulink的联合仿真。
MPC变桨控制
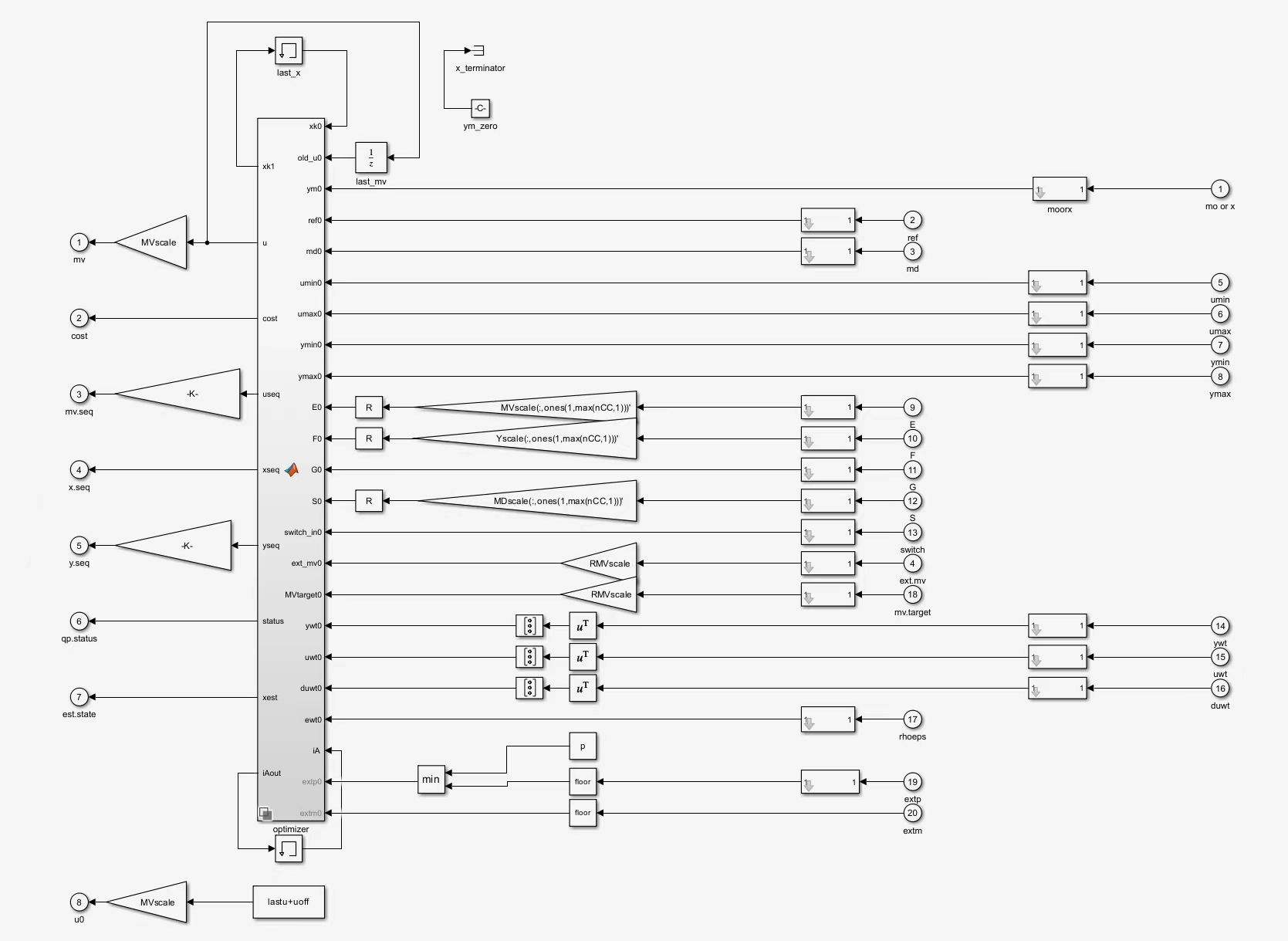
MPC(Model Predictive Control,模型预测控制),简单说就是基于系统模型预测未来的输出,并根据预测结果在线优化控制输入,使系统达到预期性能。在风机变桨控制这块,我们设计的是多入多出线性MPC控制器。为啥是多入多出呢?因为风机运行过程中有多个关键变量需要协同控制,比如风速、桨距角、发电机转速等等。就像开车,你得同时关注速度、方向盘角度、挡位等多个因素一样。
举个简单的代码栗子(这里以Python为例,只是示意逻辑哈):
import numpy as np
# 定义系统参数
A = np.array([[1, 0.1], [0, 1]]) # 状态转移矩阵
B = np.array([[0.01], [0.1]]) # 控制输入矩阵
Q = np.array([[1, 0], [0, 1]]) # 状态权重矩阵
R = np.array([[0.1]]) # 控制输入权重矩阵
# 定义预测时域和控制时域
Np = 10
Nu = 5
def mpc_controller(x, y_ref):
# 初始化预测状态和控制输入
X_pred = np.zeros((A.shape[0], Np + 1))
U_pred = np.zeros((B.shape[1], Nu))
X_pred[:, 0] = x
# 构建预测模型
for k in range(Np):
if k < Nu:
X_pred[:, k + 1] = A.dot(X_pred[:, k]) + B.dot(U_pred[:, k])
else:
X_pred[:, k + 1] = A.dot(X_pred[:, k])
# 构建代价函数
cost = 0
for k in range(Np):
cost += (X_pred[:, k] - y_ref).T.dot(Q).dot(X_pred[:, k] - y_ref)
if k < Nu:
cost += U_pred[:, k].T.dot(R).dot(U_pred[:, k])
# 优化求解控制输入
# 这里可以使用一些优化库,比如cvxpy,为简化省略具体求解代码
u_opt = np.random.rand(B.shape[1])
return u_opt在这段代码里,我们先定义了系统的一些基本参数,像状态转移矩阵 A、控制输入矩阵 B 以及权重矩阵 Q 和 R。权重矩阵的作用就像是给不同的变量打标签,告诉控制器哪些变量更重要。预测时域 Np 和控制时域 Nu 决定了我们预测多远的未来以及在多远的未来内调整控制输入。mpc_controller 函数就是具体实现MPC控制逻辑的地方,先预测未来状态,再构建代价函数,虽然这里简化了优化求解部分,但基本思路就是通过最小化代价函数找到最优的控制输入。
OpenFAST与Simulink联合仿真
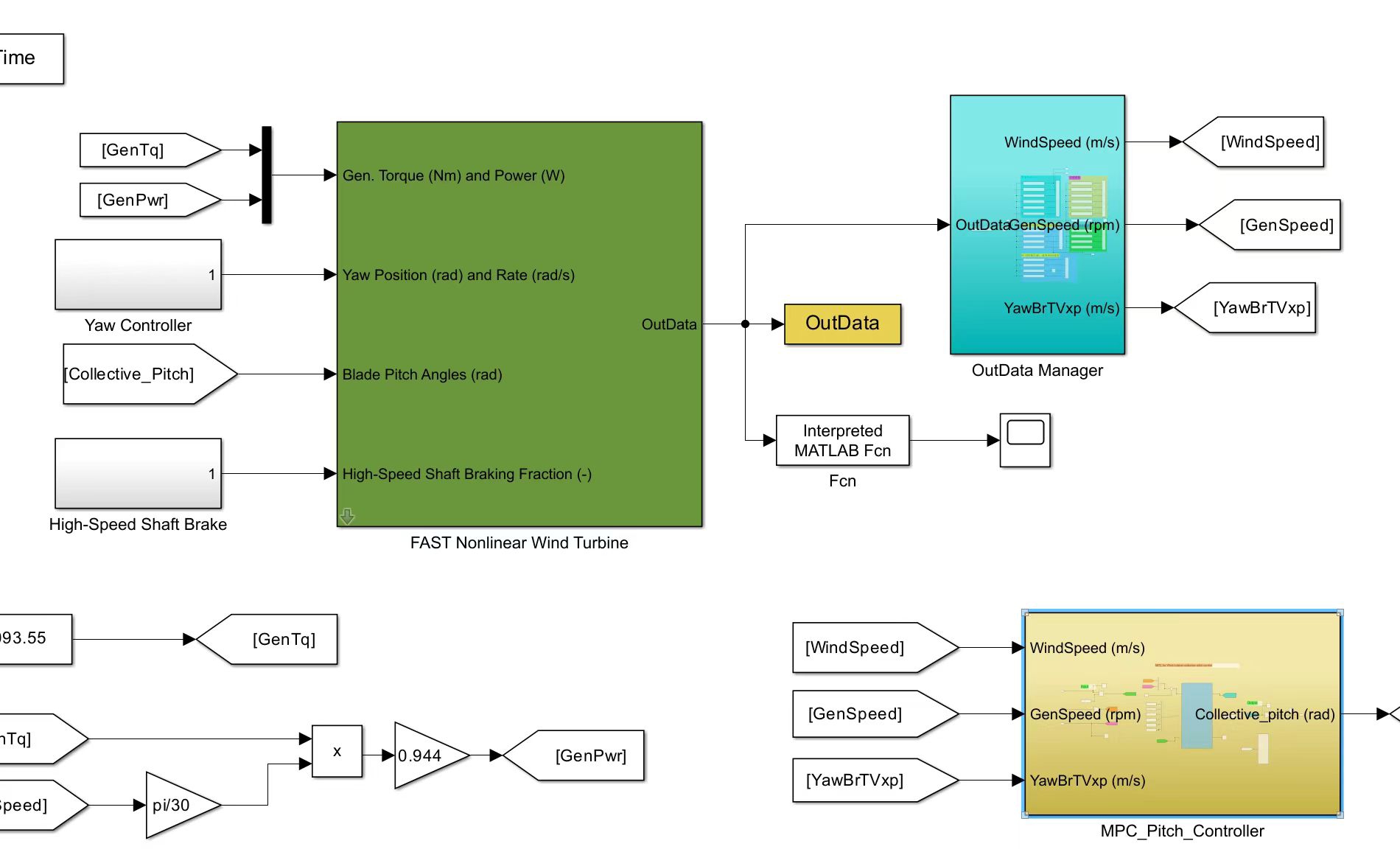
这次我们选用的机型是OpenFAST海上固定式单桩5MW风机。OpenFAST是一款广泛使用的风力发电机模拟软件,能对风机进行多物理场耦合建模。Simulink则是MATLAB里强大的动态系统建模、仿真和分析工具。把它们联合起来,就相当于给风机控制仿真来了个“强强联合”。
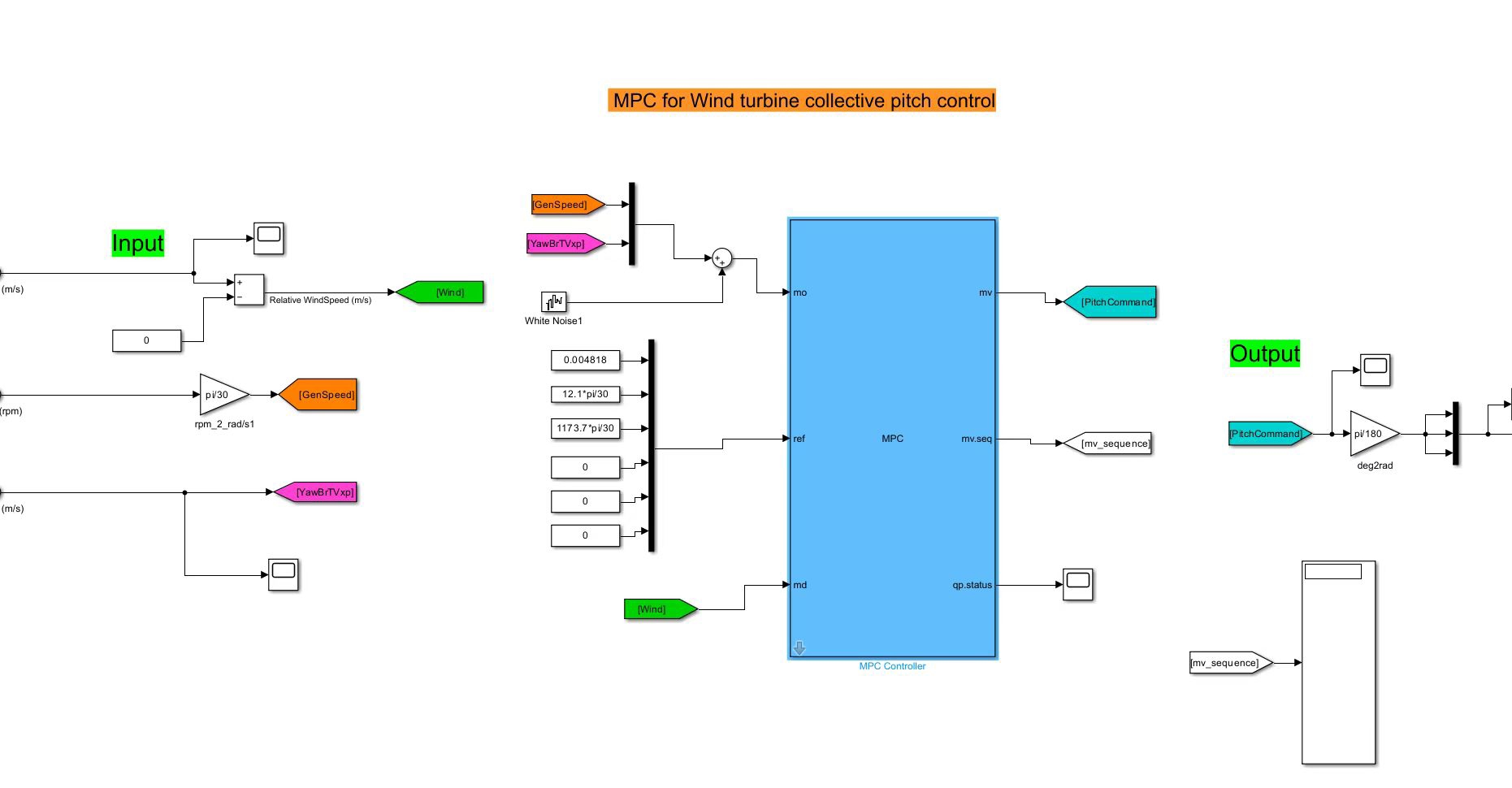
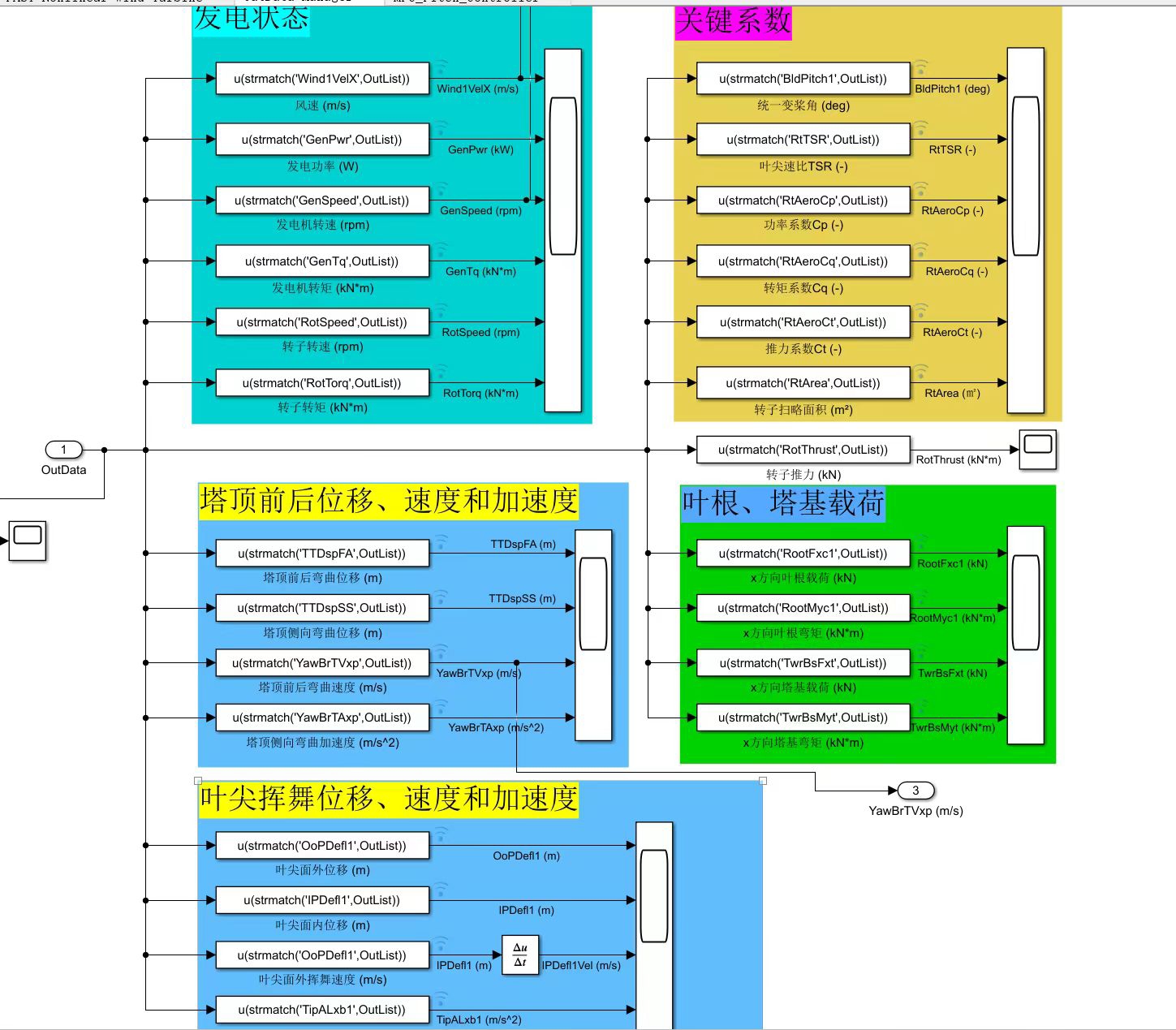
在联合仿真流程里,首先要在OpenFAST里搭建好风机的物理模型,包括空气动力学、结构动力学等模块。就好比搭乐高,每个组件都有它特定的位置和功能。然后在Simulink里构建MPC控制器模型,并通过接口与OpenFAST进行数据交互。比如说,OpenFAST把实时的风速、风机状态等数据传给Simulink,Simulink里的MPC控制器根据这些数据算出最优的桨距角控制指令,再传回OpenFAST去调整风机桨叶角度。
5MW海上风机变桨控制仿真程序及参考文献
这里附上5MW海上风机变桨控制仿真程序(完整代码因篇幅限制不全部展示,仅提供关键部分思路):
% 在Simulink中构建模型部分
% 创建MPC控制器模块
mpc_controller = mpc(A, B, Q, R, Np, Nu);
% 连接OpenFAST与Simulink接口模块
% 假设已经有接口函数openfast_interface
[wind_speed, turbine_status] = openfast_interface();
% 根据输入数据计算桨距角
pitch_angle = mpc_controller(wind_speed, turbine_status);
% 将桨距角指令传回OpenFAST
openfast_interface(pitch_angle);这段Matlab代码展示了在Simulink环境下,如何结合MPC控制器与OpenFAST接口进行变桨控制。先是创建了MPC控制器,然后通过接口函数获取OpenFAST的数据,计算桨距角后再传回去。
参考文献:
[1] 《风力发电机组模型预测控制技术研究》 - 详细阐述了MPC在风机控制中的理论与应用。
[2] OpenFAST官方文档 - 深入了解OpenFAST的模型搭建与参数设置。
通过MPC变桨控制以及OpenFAST与Simulink的联合仿真,我们能更精准地模拟和优化风机的运行,为提升风电效率和稳定性提供有力支持。希望这篇博文能给风电控制领域的小伙伴们一些启发,一起在这个充满挑战与机遇的领域里探索前行!

开源鸿蒙跨平台开发社区汇聚开发者与厂商,共建“一次开发,多端部署”的开源生态,致力于降低跨端开发门槛,推动万物智联创新。
更多推荐



 40
40 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)