OFDM Reference Signal Pattern Design Criteria for Integrated Communication and Sensing
摘要——扩展模糊性能 (EAP) 包括所有的栅瓣和旁瓣,它指明了在没有无用峰值的情况下可用于目标参数估计的最大可探测区域,并且对雷达传感器设计至关重要。在双基地感知的 EAP 需求的驱动下,我们提出了针对正交频分复用 (OFDM) 参考信号 (RS) 图样的设计准则。该设计不仅在不同类型的感知算法下改善了时延和多普勒频移域的 EAP,而且还减少了通信感知一体化的资源开销。通过对当前 RS 图样的 FFT 后处理进行最小修改,保护间隔得以扩展到传统的循环前缀 (CP) 之外,同时保持了无码间干扰 (ISI) 的时延估计。
- 对于标准分辨率感知算法,我们建议使用一个与 RS 梳状结构尺寸互质的线性斜率的交错偏移。
- 而对于超分辨率感知算法,我们为相应可实现的 EAP 推导出了梳状交错偏移的充分必要条件,以及由此合成的新图样。
此外,我们将超分辨率感知算法的 RS 图样设计准则推广到不规则形式,这为相关算法最小化了资源元素 (REs) 的数量以消除所有旁瓣。从当前定位 RS 中的交错梳状图样出发,我们的广义设计最终移除了任何规则形式,以实现最终的灵活性。总之,所提出的技术有望扩展雷达感知中距离和速度估计的无 ISI 和无模糊范围。
索引术语——双基地感知,通信感知一体化 (ICAS),正交频分复用 (OFDM),参考信号 (RS),第六代 (6G)。
文章目录
I. INTRODUCTION
对于双基地感知场景,感知接收机不知道 ICAS 的数据载荷,因此通信参考信号 (RS) 是其用于估计由目标引起的时延和多普勒频移的最直接的无线电资源 [3], [15]。单基地感知则可以同时利用 RS 和数据载荷 [16]。另一方面,由于功率损耗取决于往返传播,功率预算在单基地感知中至关重要。在路径损耗主导的场景中,由于采用了特殊的序列设计,RS 有潜力实现比传统 OFDM 信号更好的峰均功率比 (PAPR) 性能。时延和多普勒频移分别与感知目标的距离和径向速度成正比。通信 RS 也具备感知信号所期望的类似特性,例如良好的自相关特性和低 PAPR [17]。因此,已有研究致力于将通信 RS 复用于感知,
例如,在 [18]、[19] 和 [20] 中将长期演进 (LTE) 的 RSS 和定位参考信号 (PRS) 用于雷达感知。 [21] 提出了一种针对高能效 5G 车联网 (V2X) ICAS 的联合 RS 设计和功率优化方案。5G NR 系统中有多种类型的 RS:解调参考信号 (DMRS)、信道状态信息参考信号 (CSI-RS)、跟踪参考信号 (TRS)、相位跟踪参考信号 (PTRS) 以及 PRS [17]。大多数通信 RS 是为信道状态信息和通信接收机解调而设计的。其中,5G PRS 采用了一种特殊设计,即具有周期性交错偏移(a cycle of staggering offsets)的多个梳状 RS 符号,这专为时延估计而设计,但并非同时为时延和多普勒估计而设计。因此,需要从通用的感知准则中衍生出额外的考量,以审视其他的可能性。具体来说,当存在多普勒频移被加入到待估变量中时,模糊和旁瓣会出现在二维时延-多普勒平面(2-D delay-and-Doppler plane)上。
现有的工作大多集中在传统 RS 或专用感知波形上。本文首次尝试对 OFDM 感知 RS 设计进行进一步的推广,包括不同的时频密度、交错偏移和不规则 RS 图样,旨在以较小的开销改善感知性能和分辨率。在雷达感知中,时延和多普勒的分辨率以及 模糊加旁瓣 是系统设计的两个重要标准。超分辨率感知算法虽然可以提高感知分辨率,但比标准分辨率算法需要更高的计算复杂度。此处考虑的标准分辨率算法包括 延迟求和 和 周期图 (例如二维 FFT) [22], [23], [24]。
在 [25] 中,我们基于上述标准分辨率算法研究了交错梳状 RS 设计。在本文中,我们将把我们的研究扩展到超分辨率算法(super-resolution algorithms)和不规则 RS 设计。对于超分辨率感知算法,我们以雷达感知中两种常用的算法为例,即迭代自适应方法 (iterative adaptive approach,IAA) 和二维多重信号分类 (MUSIC) [26], [27], [28], [29], [30], [31], [32], [33]。
从根本上说,感知信号的总带宽和持续时间分别决定了可实现的时延和多普勒分辨率。尽管如此,在下一节中,我们将展示调整梳状 RS 资源元素 (REs) 在时域和频域的密度不仅可以调节分辨率,还会改变时延和多普勒域中的模糊和旁瓣。此后,由信号格式和接收机算法引起的模糊和旁瓣被称为扩展模糊性能 (EAP)。而同时没有模糊和不期望的旁瓣将被定义为非模糊
II. GENERAL COMB RS PATTERNS WITH UNIFORMSYMBOL SPACING、
一个通用的梳状 RS 图样可以由图 1 中的以下参数来表征。
-
S sub S_\text{sub} Ssub (单位:子载波数) 是 RE 的 RS 频域间距,对于梳状 RS,有 S s u b ≥ 2 S_{sub} \geq 2 Ssub≥2。 S s u b S_{sub} Ssub 也被称为梳齿尺寸,它决定了频域 RE 的密度。
-
S sym S_\text{sym} Ssym (单位:符号数) 是 RS 符号的时域间隔 (即时域上的 RE 密度)。
-
F i F_i Fi (单位:子载波数) 是第 i i i 个 RS 符号的频域 RE 偏移 (或交错偏移)。
-
M M M 和 N N N 分别是感知 RS 符号的数量和子载波的总数。从第一个感知 RS 到最后一个感知 RS 的总时间跨度为 M S s y m T MS_{sym}T MSsymT,其中 T T T 是一个 CP-OFDM 符号的时间长度。
可以通过 S s u b S_{sub} Ssub、 S s y m S_{sym} Ssym、 F i F_i Fi、 M M M 和 N N N 来调整 RS 图样。图 1 展示了一个示例,其中 S s u b = 4 S_{sub} = 4 Ssub=4, S s y m = 2 S_{sym} = 2 Ssym=2, ( F 0 , F 1 ) = ( 0 , 2 ) (F_0, F_1) = (0, 2) (F0,F1)=(0,2), M = 2 M=2 M=2 且 N = 12 N=12 N=12。

梳状 RS 有几个好处。
- 首先,它能提升每个 RE 的能量以获得更好的覆盖范围。
- 其次,与子带 RE 块分配相比,它能用较少数量的 RE 跨越整个信道带宽,从而最大化时延分辨率。
- 第三,它支持不同的基站 PRS 复用或数据 RE 插入。
然而,对于标准分辨率算法,梳状 RS 会在分数符号级别(fractional symbol level)上引入时延模糊。因此,5G PRS 采用了在多个符号上具有周期性交错偏移的梳状 RS 图样,以保持最多一个有效 OFDM 符号的无模糊时延 [17]。
尽管如此,感知应用需要我们审视其他 RS 图样设计的可能性。具体来说,当多普勒频移被加入到待估变量中时,不期望的旁瓣会出现在二维的时延-多普勒平面上。在 RE 数量固定的情况下,增大 S s u b S_{sub} Ssub 和 S s y m S_{sym} Ssym 会增加占用的带宽和时间长度,从而分别提升距离 (时延) 和速度 (多普勒频移) 的分辨率。然而,通过调整 S s u b S_{sub} Ssub 和 S s y m S_{sym} Ssym 来提升分辨率的代价是最大无模糊时延和最大无模糊多普勒频移的减小。时延分辨率与 ( 1 / [ Δ f K 1 S s u b ] ) (1/[\Delta f K_1 S_{sub}]) (1/[ΔfK1Ssub]) 成正比,最大无模糊时延与 ( 1 / [ Δ f S s u b ] ) (1/[\Delta f S_{sub}]) (1/[ΔfSsub]) 成正比,其中 Δ f \Delta f Δf 是子载波间隔 (SCS), K 1 K_1 K1 是频域中 RE 的数量。对于多普勒估计,多普勒分辨率与 ( 1 / [ M T S s y m ] ) (1/[M T S_{sym}]) (1/[MTSsym]) 成正比,最大无模糊多普勒与 ( 1 / [ T S s y m ] ) (1/[T S_{sym}]) (1/[TSsym]) 成正比。
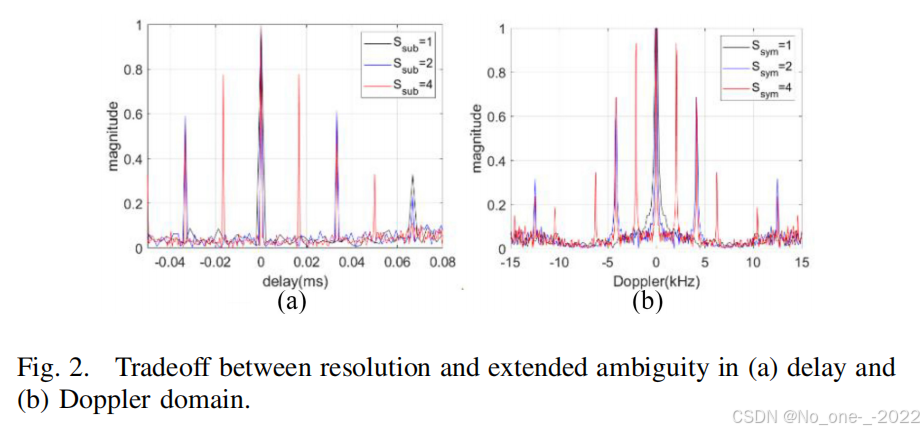
图 2 表明,分别增大 S s y m S_{sym} Ssym 和 S s u b S_{sub} Ssub 会使 3-dB 主瓣宽度减小,从而增强多普勒和时延分辨率。然而,尽管分辨率性能得到改善,旁瓣会出现在更靠近主瓣的位置,并导致 EAP 性能变差。在第三至第六节中,我们将分析如何设计不同 RS 图样的交错偏移,以便在增大 S s y m S_{sym} Ssym ( S s u b S_{sub} Ssub) 的同时仍能保持良好的 EAP。
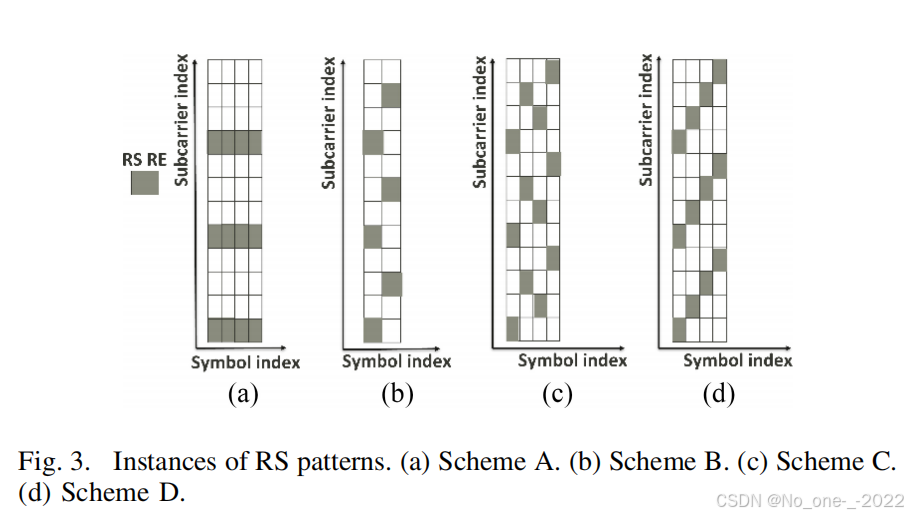
本文的其余部分将展示几种具有均匀符号间距的 RS 图样,如图 3 所示,并分为方案 A、B、C 和 D。
-
图 3(a) 展示了方案 A 的一个实例,其中 S s u b = 4 S_{sub}=4 Ssub=4, S s y m = 1 S_{sym}=1 Ssym=1,这与 5G PDCCH DMRS 或 TRS 类似。该图样在所有 RS 符号上保持相同的 RE 位置,即对于任意第 i i i 个 RS 符号, F i F_i Fi 保持不变。
-
图 3(b) 描述了方案 B 的一个实例,它与部分 PRS (一个完整交错周期的子集) 类似,其中 S s u b = 4 S_{sub}=4 Ssub=4, S s y m = 1 S_{sym}=1 Ssym=1, F 0 = 0 F_0=0 F0=0,以及 F 1 = S s u b / 2 F_1=S_{sub}/2 F1=Ssub/2。在 5G NR 中,部分 PRS 的格式是将两个 RS 符号的 REs 交错半个偶数梳齿的尺寸 (即,对于 F 0 = f F_0=f F0=f, F 1 = f + ⌊ S s u b / 2 ⌋ F_1=f+\lfloor S_{sub}/2 \rfloor F1=f+⌊Ssub/2⌋)。
-
图 3 ( c ) 3(c) 3(c) 展示了方案 C 的一个实例,其中 S s u b = 4 S_{sub}=4 Ssub=4, S s y m = 1 S_{sym}=1 Ssym=1,并使用了 5G PRS 的交错偏移序列。当 S s y m = 1 S_{sym}=1 Ssym=1 时,该 RS 图样即为一个 5G PRS。
-
图 3(d) 展示了我们提出的方案 D 的一个实例,其中 S s u b = 4 S_{sub}=4 Ssub=4, S s y m = 1 S_{sym}=1 Ssym=1 且 p = 1 p=1 p=1,这是一种线性斜率交错,其斜率与梳齿尺寸互质。其交错偏移序列为 F i = mod ( p ⋅ ( i − 1 ) , S s u b ) F_i=\text{mod}(p \cdot (i-1), S_{sub}) Fi=mod(p⋅(i−1),Ssub),其中 i = 0 , … , S s u b − 1 i=0, \dots, S_{sub}-1 i=0,…,Ssub−1,且 p p p 与 S s u b S_{sub} Ssub 互质。
III. AMBIGUITY PERFORMANCE OF DELAY-AND-SUM
基于“延迟-求和”的时域信号 s ( t ) s(t) s(t) 的模糊函数 (AF) 表示为 [22]
A ( τ , f ) = 1 E s ∣ ∫ − ∞ ∞ s ( t ) e j 2 π f t s ∗ ( t − τ ) d t ∣ (1) A(\tau,f) = \frac{1}{E_s} \left| \int_{-\infty}^{\infty} s(t)e^{j2\pi ft}s^*(t-\tau) \text{d}t \right| \tag{1} A(τ,f)=Es1 ∫−∞∞s(t)ej2πfts∗(t−τ)dt (1)
其中 E s = ∫ − ∞ ∞ s ( t ) s ∗ ( t ) d t E_s = \int_{-\infty}^{\infty} s(t)s^*(t)\text{d}t Es=∫−∞∞s(t)s∗(t)dt, f f f 是多普勒频移, τ \tau τ 是时延。请
注意,此 AF 是针对延迟和求和的。对于其他感知算法,我们将使用 EAP 来分析其模糊性能。
此外,超分辨率算法可以抑制扩展模糊 [34]。我们稍后将展示,通过合理设计 RS,超分辨率算法可以实现更好的 EAP。通常,设计准则是最小化在 ( τ , f ) ≠ ( τ ∗ , f ∗ ) (\tau,f) \ne (\tau^*, f^*) (τ,f)=(τ∗,f∗) 区域内的 A ( τ , f ) A(\tau,f) A(τ,f) 值,其中 τ ∗ \tau^* τ∗ 和 f ∗ f^* f∗ 是标称的真实时延和多普勒。为简化后续章节的描述,我们将 ( τ ∗ , f ∗ ) (\tau^*, f^*) (τ∗,f∗) 设置为 ( 0 , 0 ) (0,0) (0,0) 而不失一般性 (without loss of generality,WLOG),因为 AF 是 RS 图样在二维域中的一种冲激响应形式。在 ( τ , f ) ≠ ( 0 , 0 ) (\tau,f) \ne (0,0) (τ,f)=(0,0) 处,超过雷达动态范围的较大 A ( τ , f ) A(\tau,f) A(τ,f) 值是不期望的旁瓣。这些旁瓣限制了时延和多普勒频移的无模糊可检测范围。当存在旁瓣时,设计准则就变为如何扩大二维最大无模糊区域,或如何设计波形以使旁瓣位置 ( τ , f ) (\tau,f) (τ,f) 尽可能远离 ( 0 , 0 ) (0,0) (0,0)。例如,在雷达感知中,科斯塔斯阵列 (Costas array) 就是基于此类准则设计的 [35], [36]。该设计准则也适用于二维 FFT 和超分辨率感知算法。
现在,我们基于“延迟-求和”和第二节中的通用梳状 RS 图样,推导 AF 的一个通用表达式。设 T s T_s Ts 为有效 OFDM 符号时长 (SCS 的倒数), T c p T_{cp} Tcp 为 CP 时长, T = T c p + T s T=T_{cp}+T_s T=Tcp+Ts 为添加了 CP 的 OFDM 符号时长,并且 X i \mathbf X_i Xi 为第 i i i 个梳状 RS 的频域 RE 加扰序列。在时长 T s T_s Ts 内,长度为 N N N 的第 i i i 个 RS 符号采样向量表示为 Y = { Y ( n ) } n = 0 N − 1 \mathbf{Y}=\{Y(n)\}_{n=0}^{N-1} Y={Y(n)}n=0N−1,其中第 n n n 个采样点为
Y ( n ) = ∑ κ = 0 N / S s u b − 1 X i ( κ S s u b + F i ) e j 2 π ( κ S s u b + F i ) n N . (2) Y(n) = \sum_{\kappa=0}^{N/S_{sub}-1} X_i(\kappa S_{sub} + F_i) e^{j2\pi \frac{(\kappa S_{sub} + F_i)n}{N}}. \tag{2} Y(n)=κ=0∑N/Ssub−1Xi(κSsub+Fi)ej2πN(κSsub+Fi)n.(2)
请注意, N N N 是子载波的数量, N / S s u b N/S_{sub} N/Ssub 表示梳状感知 RS 的 RE 数量。观察可得
Y ( n ′ + N l S s u b ) = Y ( n ′ ) e j 2 π F i l S s u b (3) Y\left(n' + \frac{Nl}{S_{sub}}\right) = Y(n') e^{j\frac{2\pi F_i l}{S_{sub}}} \tag{3} Y(n′+SsubNl)=Y(n′)ejSsub2πFil(3)
其中 n ′ = 0 , 1 , 2 , … , ( N / S s u b ) − 1 n'=0, 1, 2, \dots, (N/S_{sub}) - 1 n′=0,1,2,…,(N/Ssub)−1 且 l = 0 , 1 , 2 , … , S s u b − 1 l=0, 1, 2, \dots, S_{sub} - 1 l=0,1,2,…,Ssub−1。因此, Y \mathbf{Y} Y 可以被进一步均等地划分为 S s u b S_{sub} Ssub 个子集,其中第 l l l 个子集表示为 Y l \mathbf{Y}_l Yl,每个子集的长度为 ( N / S s u b ) (N/S_{sub}) (N/Ssub) 并且
Y l = Y 0 e j ( 2 π F i l S s u b ) , Y l = { Y ( n ) } n = l N / S s u b ( l + 1 ) N / S s u b − 1 . (4) \mathbf{Y}_l = \mathbf{Y}_0 e^{j\left(\frac{2\pi F_i l}{S_{sub}}\right)}, \quad \mathbf{Y}_l=\{Y(n)\}_{n=lN/S_{sub}}^{(l+1)N/S_{sub}-1}. \tag{4} Yl=Y0ej(Ssub2πFil),Yl={Y(n)}n=lN/Ssub(l+1)N/Ssub−1.(4)
设添加了 CP 的 OFDM 符号的时间序列为 Z = { Z ( n ) } n = 0 N ′ \mathbf{Z}=\{Z(n)\}_{n=0}^{N'} Z={Z(n)}n=0N′,在添加了 CP 的时长 T T T 内, Z \mathbf{Z} Z 的第 n n n 个采样点为
Z ( n ) = ∑ κ = 0 N / S s u b − 1 X i ( κ S s u b + F i ) e j 2 π ( κ S s u b + F i ) N ( n − N c p ) (5) Z(n) = \sum_{\kappa=0}^{N/S_{sub}-1} X_i(\kappa S_{sub} + F_i) e^{j2\pi \frac{(\kappa S_{sub} + F_i)}{N}(n-N_{cp})} \tag{5} Z(n)=κ=0∑N/Ssub−1Xi(κSsub+Fi)ej2πN(κSsub+Fi)(n−Ncp)(5)
观察一下就可以知道 Z ( 0 ) = Y ( − N c p ) = Y ( N − N c p ) Z(0)=Y(-N_{cp})=Y(N-N_{cp}) Z(0)=Y(−Ncp)=Y(N−Ncp)
其中 N ′ = ( N + N c p ) N'=(N+N_{cp}) N′=(N+Ncp)。设 M M M 为 RS 符号的数量,通过对 M M M 个 RS 符号进行“延迟-求和”得到的 AF 表示为
A ( τ , f ) = ∣ ∑ i = 0 M − 1 ∑ n = i S s y m N ′ i S s y m N ′ + N ′ − 1 Z ( n ) Z ∗ ( n − τ N T s ) e j 2 π f n T N ∣ . (6) A(\tau,f) = \left| \sum_{i=0}^{M-1} \sum_{n=iS_{sym}N'}^{iS_{sym}N'+N'-1} Z(n)Z^*\left(n-\frac{\tau N}{T_s}\right) e^{j\frac{2\pi f n T}{N}} \right|. \tag{6} A(τ,f)= i=0∑M−1n=iSsymN′∑iSsymN′+N′−1Z(n)Z∗(n−TsτN)ejN2πfnT .(6)
如 (4) 所示,由于一个 OFDM 符号的时间采样拥有 S s u b S_{sub} Ssub 个具有分段相位旋转的重复子集,因此“延迟-求和”接收机的强旁瓣出现在
τ = ( l ⋅ T s ) / S s u b = ( l ⋅ N / S s u b ) ⋅ ( T s / N ) \tau = (l \cdot T_s)/S_{sub} = (l \cdot N / S_{sub}) \cdot (T_s / N) τ=(l⋅Ts)/Ssub=(l⋅N/Ssub)⋅(Ts/N)
其中 ( l ⋅ N / S s u b ) (l \cdot N / S_{sub}) (l⋅N/Ssub) 是 (3) 中第 l l l 个子集的起始采样索引。在这种情况下,设计需要一个具有良好自相关特性的序列,使得在 τ ≠ ( l ⋅ T s / S s u b ) \tau \ne (l \cdot T_s / S_{sub}) τ=(l⋅Ts/Ssub) 处的 AF 值可以忽略不计。然后,我们可以将 τ = ( l ⋅ T s / S s u b ) \tau = (l \cdot T_s / S_{sub}) τ=(l⋅Ts/Ssub) 代入 (6) 来重点分析 AF。假设 X i X_i Xi 在时域保持恒定包络 (例如,频域 Zadoff-Chu 序列),我们得到在时延 τ = ( l ⋅ T s / S s u b ) \tau = (l \cdot T_s / S_{sub}) τ=(l⋅Ts/Ssub) 和多普勒频率 f f f 处、 M M M 个 RS 符号上的 AF 为
A ( T s l S s u b , f ) = ∣ S ⋅ e − j 2 π f l T S s u b ∑ i = 0 M − 1 e − j 2 π F i l S s u b ⋅ ∑ n = i S s y m N ′ i S s y m N ′ + N ′ − N l S s u b − 1 e j 2 π f n T N ∣ (7) A\left(\frac{T_s l}{S_{sub}}, f\right) = \left| S \cdot e^{-j\frac{2\pi flT}{S_{sub}}} \sum_{i=0}^{M-1} e^{-j\frac{2\pi F_i l}{S_{sub}}} \cdot \sum_{n=iS_{sym}N'}^{iS_{sym}N'+N'-\frac{Nl}{S_{sub}}-1} e^{j\frac{2\pi fnT}{N}} \right| \tag{7} A(SsubTsl,f)= S⋅e−jSsub2πflTi=0∑M−1e−jSsub2πFil⋅n=iSsymN′∑iSsymN′+N′−SsubNl−1ejN2πfnT (7)
其中 S = Z ( n ) Z ∗ ( n ) S = Z(n)Z^*(n) S=Z(n)Z∗(n) 是一个常数。多普勒频率是通过时间序列的一个可变 f f f 相位旋转版本来检测的。在 f = 0 f=0 f=0 的情况下 (例如,定位),交错偏移序列 { F i } \{F_i\} {Fi} 通过以下方式直接影响旁瓣位置
A ( T s l S s u b , 0 ) = ∣ S ⋅ ( N ′ − N l S s u b ) ∑ i = 0 M − 1 e − j 2 π F i l S s u b ∣ . (8) A\left(\frac{T_s l}{S_{sub}}, 0\right) = \left| S \cdot \left(N' - \frac{Nl}{S_{sub}}\right) \sum_{i=0}^{M-1} e^{-j\frac{2\pi F_i l}{S_{sub}}} \right|. \tag{8} A(SsubTsl,0)= S⋅(N′−SsubNl)i=0∑M−1e−jSsub2πFil .(8)
例如,当 M = S s u b M=S_{sub} M=Ssub, { F i } i = 0 S s u b − 1 = { 0 , 1 , … , S s u b − 1 } \{F_i\}_{i=0}^{S_{sub}-1} = \{0, 1, \dots, S_{sub}-1\} {Fi}i=0Ssub−1={0,1,…,Ssub−1} 时,对于所有的 l ∈ { 1 , … , S s u b − 1 } l \in \{1, \dots, S_{sub}-1\} l∈{1,…,Ssub−1} 都有 ∑ i = 0 M − 1 e − j ( 2 π F i l ) / S s u b = 0 \sum_{i=0}^{M-1} e^{-j(2\pi F_i l)/S_{sub}} = 0 ∑i=0M−1e−j(2πFil)/Ssub=0,因此在时延范围 ( 0 , T s ) (0, T_s) (0,Ts) 内沿 f = 0 f=0 f=0 轴的旁瓣可以被消除。本节接下来将研究基于“延迟-求和”算法得到的不同 RS 图样的 AF 特性。
- 设定条件并简化求和表达式
原始求和为 S = ∑ i = 0 M − 1 e − j ( 2 π F i l ) / S s u b S = \sum_{i=0}^{M-1} e^{-j(2\pi F_i l)/S_{sub}} S=∑i=0M−1e−j(2πFil)/Ssub。
根据给定的前提条件:
- M = S s u b M = S_{sub} M=Ssub
- { F i } = { 0 , 1 , … , S s u b − 1 } \{F_i\} = \{0, 1, \dots, S_{sub}-1\} {Fi}={0,1,…,Ssub−1},即 F i = i F_i=i Fi=i
- l ∈ { 1 , 2 , … , S s u b − 1 } l \in \{1, 2, \dots, S_{sub}-1\} l∈{1,2,…,Ssub−1}
代入后,求和表达式简化为:
S = ∑ i = 0 S s u b − 1 e − j 2 π i l S s u b S = \sum_{i=0}^{S_{sub}-1} e^{-j\frac{2\pi i l}{S_{sub}}} S=i=0∑Ssub−1e−jSsub2πil
- 识别为等比数列并应用求和公式
上述求和是一个首项 a = 1 a=1 a=1、项数为 n = S s u b n=S_{sub} n=Ssub 的等比数列。其公比 r r r 为:
r = e − j 2 π l S s u b r = e^{-j\frac{2\pi l}{S_{sub}}} r=e−jSsub2πl
由于 l ∈ { 1 , . . . , S s u b − 1 } l \in \{1, ..., S_{sub}-1\} l∈{1,...,Ssub−1},可知 r ≠ 1 r \ne 1 r=1。因此,可应用等比数列求和公式 S n = a 1 − r n 1 − r S_n = a \frac{1-r^n}{1-r} Sn=a1−r1−rn:
S = 1 − r S s u b 1 − r = 1 − ( e − j 2 π l S s u b ) S s u b 1 − e − j 2 π l S s u b S = \frac{1 - r^{S_{sub}}}{1-r} = \frac{1 - (e^{-j\frac{2\pi l}{S_{sub}}})^{S_{sub}}}{1 - e^{-j\frac{2\pi l}{S_{sub}}}} S=1−r1−rSsub=1−e−jSsub2πl1−(e−jSsub2πl)Ssub- 分析分子与分母
- 分子 (Numerator):
1 − ( e − j 2 π l S s u b ) S s u b = 1 − e − j 2 π l 1 - (e^{-j\frac{2\pi l}{S_{sub}}})^{S_{sub}} = 1 - e^{-j2\pi l} 1−(e−jSsub2πl)Ssub=1−e−j2πl
因为 l l l 是整数,根据欧拉公式, e − j 2 π l = cos ( − 2 π l ) + j sin ( − 2 π l ) = 1 e^{-j2\pi l} = \cos(-2\pi l) + j\sin(-2\pi l) = 1 e−j2πl=cos(−2πl)+jsin(−2πl)=1。
因此,分子为 1 − 1 = 0 1 - 1 = 0 1−1=0。- 分母 (Denominator):
分母为 1 − r = 1 − e − j 2 π l S s u b 1-r = 1 - e^{-j\frac{2\pi l}{S_{sub}}} 1−r=1−e−jSsub2πl。
因为 l S s u b \frac{l}{S_{sub}} Ssubl 不为整数,所以 e − j 2 π l S s u b ≠ 1 e^{-j\frac{2\pi l}{S_{sub}}} \ne 1 e−jSsub2πl=1,即分母不为零。
- 得出结论
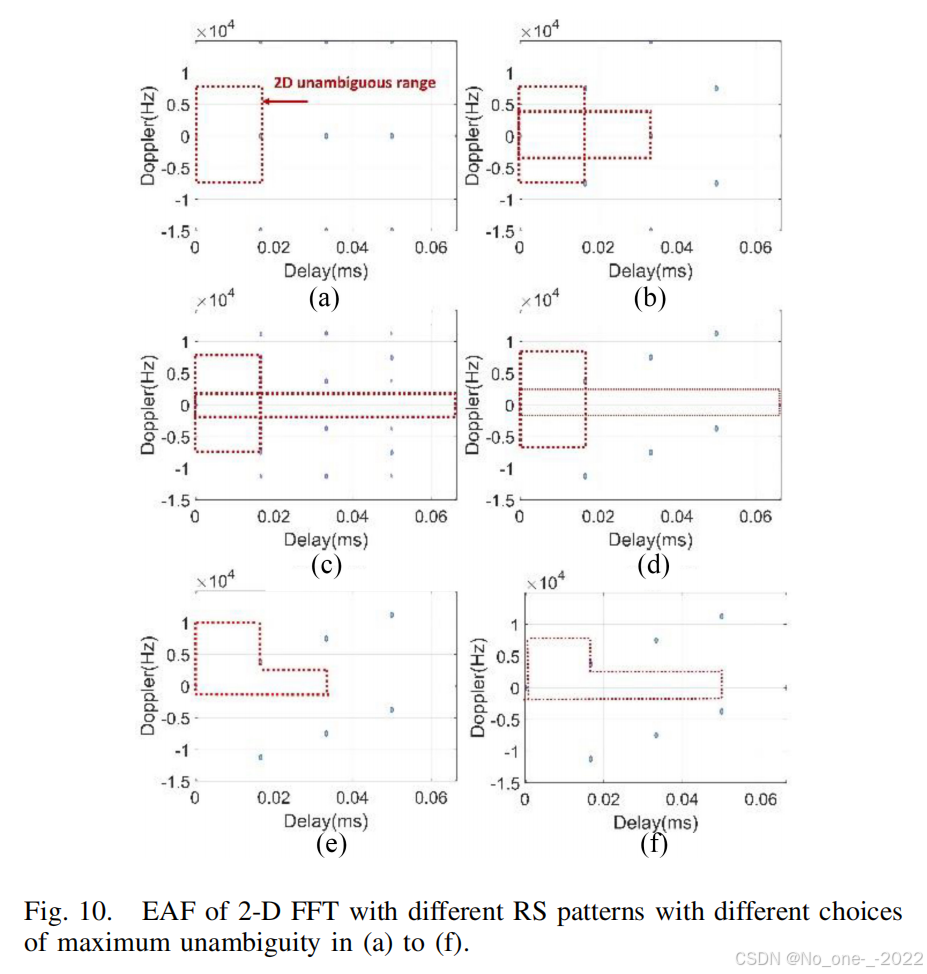
我们将使用二维无模糊范围来表征感知算法在分析中能够无模糊检测到的最大多普勒和最大时延。下文中我们称之为二维最大无模糊性。图 4(b) 中的红色虚线矩形就是一个例子。二维无模糊范围由主瓣的关联旁瓣决定。对于主瓣位于二维无模糊范围内的任何目标,其关联旁瓣会落在红色矩形之外,这意味着在指定的二维范围内不存在模糊。因此,RS 设计需要在有效利用 RE 的同时扩大二维无模糊范围。AF 是在 15 kHz SCS 的设置下进行仿真的。
A. Scheme A–Patterns Similar to 5G PDCCH DMRS or TRS
根据 (7) 和 (8),方案 A ( F i ≡ F_i \equiv Fi≡ 恒定,无交错) 的二维 AF 旁瓣位置在 ( τ = ( l T s ) / S s u b , f = k / ( S s y m T ) ) (\tau = (lT_s)/S_{sub}, f = k/(S_{sym}T)) (τ=(lTs)/Ssub,f=k/(SsymT)),其中 l , k ∈ Z l,k \in \mathbb{Z} l,k∈Z (整数集), 0 ≤ l ≤ S s u b 0 \le l \le S_{sub} 0≤l≤Ssub, − S s y m ≤ k < S s y m -S_{sym} \le k < S_{sym} −Ssym≤k<Ssym 且 ( l , k ) ≠ ( 0 , 0 ) (l,k) \ne (0,0) (l,k)=(0,0)。需要注意的是,“延迟-求和”算法有一个例外,即在 τ = 0 , f = ± ( 1 / T ) \tau=0, f = \pm(1/T) τ=0,f=±(1/T) 处不存在模糊,因为这里没有离散时间傅里叶变换来产生频域混叠。如果 RS 符号没有时间中断 (即 S s y m = 1 S_{sym}=1 Ssym=1),那么“延迟-求和”算法的最大无模糊多普勒频率仅受采样率 N ′ / T N'/T N′/T 的限制,因为不存在与非脉冲信号的频域卷积。因此,当 S s y m > 1 S_{sym} > 1 Ssym>1 时,无模糊多普勒的范围是 [ − 1 / ( 2 S s y m T ) , 1 / ( 2 S s y m T ) ] [-1/(2S_{sym}T), 1/(2S_{sym}T)] [−1/(2SsymT),1/(2SsymT)];当 S s y m = 1 S_{sym}=1 Ssym=1 时,范围是 [ − N ′ / ( 2 T ) , N ′ / ( 2 T ) ] [-N'/(2T), N'/(2T)] [−N′/(2T),N′/(2T)]。

在图 4 的示例中展示了这些为“延迟-求和”结果产生模糊的旁瓣,该示例的参数为 S s u b = 4 S_{sub}=4 Ssub=4, S s y m = 1 S_{sym}=1 Ssym=1, F i ≡ 0 F_i \equiv 0 Fi≡0,子载波间隔 (SCS) 为 15 kHz,其中图 4(b) 是图 4(a) 的俯视图。图 5 展示了另一个示例,其参数为 S s u b = 8 S_{sub} = 8 Ssub=8, S s y m = 2 S_{sym}=2 Ssym=2 且 F i ≡ 0 F_i \equiv 0 Fi≡0。请注意,增大的梳齿尺寸 ( S s u b S_{sub} Ssub 从 4 增加到 8) 减小了最大无模糊时延,而 RS 在时间上的中断 ( S s y m = 2 S_{sym}=2 Ssym=2 而不是 1) 会导致信号与一个门控函数的频域响应发生卷积,从而在到达 N ′ / T N'/T N′/T 之前,沿着真实时延的多普勒频率轴产生模糊。然而,在这种情况下,最大无模糊时延总是受限于 ( T s / S s u b ) (T_s/S_{sub}) (Ts/Ssub)。
T max-unambiguous = 1 S sub ⋅ Δ f = 1 S sub ⋅ ( 1 Δ f ) = T s S sub T_{\text {max-unambiguous }}=\frac{1}{S_{\text {sub }} \cdot \Delta f}=\frac{1}{S_{\text {sub }}} \cdot\left(\frac{1}{\Delta f}\right)=\frac{T_{s}}{S_{\text {sub }}} Tmax-unambiguous =Ssub ⋅Δf1=Ssub 1⋅(Δf1)=Ssub Ts

B. Scheme B–Patterns Similar to Partial PRS
V. EXTENDED GUARD INTERVAL FOR POST FFTSENSING ALGORITHMS
后 FFT 频域感知算法,例如二维 FFT [23], [24] 以及超分辨率算法 [24], [25], [26], [27], [28], [29], [30], [31],通常受到 CP 时长的限制,CP 时长决定了 OFDM ICAS 系统中没有 ISI 的最大时延 (即距离)。在本节中,我们将展示带有零功率 RE 的梳状 RS 图样如何能够将抵抗 ISI 的保护间隔扩展到 CP 之外。因此,通过后 FFT 算法,可以灵活地将无 ISI 时延扩展到 CP 加上有效 OFDM 符号长度的 ( S s u b − 1 ) / S s u b (S_{sub}-1)/S_{sub} (Ssub−1)/Ssub。
假设多普勒频移相对于 OFDM 基础频率足够小,即 ∣ f ∣ < f m a x ≪ 1 / T s |f| < f_{max} \ll 1/T_s ∣f∣<fmax≪1/Ts (其中 f m a x f_{max} fmax 通常是 SCS 的 1/10),我们可以将其近似为在每个 OFDM 符号上逐块进行的恒定相位旋转。在通过连续周期使用“延迟-求和”方法估计多普勒频率的情况下,则不需要这样的假设。然而,对于后 FFT 感知算法,这个假设是必需的,因为对多普勒频率的时间观测是在 OFDM 符号的粒度上进行离散化的。回顾在 (5) 中定义的添加了 CP 的 OFDM 时间采样,现在我们将一个用于抵抗感知 ISI 的扩展保护间隔 (图 9 中的 GI) 定义为前 [ N c p + ( ⌊ N l / S s u b ⌋ ) ] [N_{cp} + (\lfloor Nl/S_{sub} \rfloor)] [Ncp+(⌊Nl/Ssub⌋)] 个采样点,其中 l ∈ { 0 , 1 , … , S s u b − 1 } l \in \{0, 1, \dots, S_{sub}-1\} l∈{0,1,…,Ssub−1} 表示分数符号索引(fractional symbol index)。
这种扩展可以重用相同的 CP-OFDM 符号 (最初为较短的多径延迟通信设计),以用于更长距离的感知,而无需采用新的波形。

当 l = S s u b − 1 l=S_{s u b}-1 l=Ssub−1 时,我们只处理 ( S s u b − ( S s u b − 1 ) ) = 1 \left(S_{s u b}-\left(S_{s u b}-1\right)\right)=1 (Ssub−(Ssub−1))=1 个子块,即只用了整个有效信号的 1 / S sub 1 / S_{\text {sub }} 1/Ssub 。信号能量利用率最低,信噪比会下降,影响探测的精度和可靠性。
设信道中感知目标的数量为 H H H,第 h h h 个目标引入的时延和多普勒频率分别为 τ h \tau_h τh 和 f h f_h fh,且 α h \alpha_h αh 是每个目标路径的复振幅系数。在移除抵抗 ISI 的扩展保护间隔后,第 i i i 个 OFDM 符号的剩余时间采样,可以用最后 ( S s u b − l ) (S_{sub}-l) (Ssub−l) 个子集的时间采样向量 G l = { G l ( m ) } \mathbf G_l = \{G_l(m)\} Gl={Gl(m)} 来表示,其中 m = 0 , 1 , … , ( ⌊ N ( S s u b − l ) / S s u b ⌋ ) − 1 m=0, 1, \dots, (\lfloor N(S_{sub}-l)/S_{sub} \rfloor) - 1 m=0,1,…,(⌊N(Ssub−l)/Ssub⌋)−1。 G l G_l Gl 的第 m m m 个元素是
G l ( m ) = ∑ h = 0 H − 1 α h Z ( N l S s u b + N c p + m − τ h T s ) ⋅ e j 2 π f h i T s y m = ∑ h = 0 H − 1 ∑ κ = 0 N S s u b − 1 α h X i ( κ S s u b + F i ) e j 2 π ( κ S s u b + F i ) N ( N l S s u b + m − τ h T s ) e j 2 π f h i T s y m (9) \begin{aligned} G_l(m) &= \sum_{h=0}^{H-1} \alpha_h Z \left( \frac{Nl}{S_{sub}} + N_{cp} + m - \frac{\tau_h}{T_s} \right) \cdot e^{j2\pi f_h i T_{sym}} \\ &= \sum_{h=0}^{H-1} \sum_{\kappa=0}^{\frac{N}{S_{sub}}-1} \alpha_h X_i(\kappa S_{sub} + F_i) e^{j \frac{2\pi(\kappa S_{sub} + F_i)}{N} \left(\frac{Nl}{S_{sub}} + m - \frac{\tau_h}{T_s}\right)} e^{j2\pi f_h i T_{sym}} \end{aligned} \tag{9} Gl(m)=h=0∑H−1αhZ(SsubNl+Ncp+m−Tsτh)⋅ej2πfhiTsym=h=0∑H−1κ=0∑SsubN−1αhXi(κSsub+Fi)ejN2π(κSsub+Fi)(SsubNl+m−Tsτh)ej2πfhiTsym(9)
其中 0 ≤ N τ ≤ min ( N c p + ( ⌊ N l / S s u b ⌋ ) , N ) \textcolor{blue}{0 \le N_\tau \le \min(N_{cp} + (\lfloor Nl/S_{sub} \rfloor), N)} 0≤Nτ≤min(Ncp+(⌊Nl/Ssub⌋),N)。为了从 G l \mathbf G_l Gl 中恢复非零 RE,接收端应首先在 FFT 之前执行以下相位去旋转程序,即
G ′ ( m ) = G l ( m ) e − j 2 π F i N ( N l S s u b + m ) (10) G'(m) = G_l(m) e^{-j\frac{2\pi F_i}{N} \left(\frac{Nl}{S_{sub}} + m\right)} \tag{10} G′(m)=Gl(m)e−jN2πFi(SsubNl+m)(10)
对于 m = 0 , 1 , … , ( ⌊ N ( S s u b − l ) / S s u b ⌋ ) − 1 m = 0, 1, \dots, (\lfloor N(S_{sub}-l)/S_{sub} \rfloor) - 1 m=0,1,…,(⌊N(Ssub−l)/Ssub⌋)−1。然后,对 G ′ \mathbf{G'} G′ 进行 FFT 后,我们得到长度为 ( ⌊ N ⋅ ( S s u b − l ) / S s u b ⌋ ) (\lfloor N \cdot (S_{sub}-l)/S_{sub} \rfloor) (⌊N⋅(Ssub−l)/Ssub⌋) 的序列 B \mathbf{B} B,并且
B ( κ ′ ) = 1 N ∑ m = 0 ( S s u b − l ) N / S s u b − 1 G ′ ( m ) e − j 2 π κ ′ S s u b m ( S s u b − l ) N . (11) B(\kappa') = \frac{1}{N} \sum_{m=0}^{(S_{sub}-l)N/S_{sub}-1} G'(m) e^{-j\frac{2\pi\kappa'S_{sub}m}{(S_{sub}-l)N}}. \tag{11} B(κ′)=N1m=0∑(Ssub−l)N/Ssub−1G′(m)e−j(Ssub−l)N2πκ′Ssubm.(11)
在 (11) 中,对于 κ ′ ∈ { ( S s u b − l ) w , w = 0 , 1 , … , ( N / S s u b ) − 1 } \kappa' \in \{(S_{sub}-l)w, w=0,1,\dots,(N/S_{sub})-1\} κ′∈{(Ssub−l)w,w=0,1,…,(N/Ssub)−1},我们可以写出
B ( κ ′ ) = ∑ h = 0 H − 1 α h S s u b − l S s u b ⋅ X i ( κ ′ S s u b S s u b − l + F i ) ⋅ e j 2 π f h i T s y m e − j 2 π τ h T s N ( κ ′ S s u b S s u b − l + F i ) . (12) B(\kappa') = \sum_{h=0}^{H-1} \alpha_h \frac{S_{sub}-l}{S_{sub}} \cdot X_i\left(\frac{\kappa'S_{sub}}{S_{sub}-l} + F_i\right) \cdot e^{j2\pi f_h i T_{sym}} e^{-j2\pi \frac{\tau_h}{T_s N}\left(\frac{\kappa' S_{sub}}{S_{sub}-l} + F_i\right)}. \tag{12} B(κ′)=h=0∑H−1αhSsubSsub−l⋅Xi(Ssub−lκ′Ssub+Fi)⋅ej2πfhiTsyme−j2πTsNτh(Ssub−lκ′Ssub+Fi).(12)
对于 κ ′ ∉ ( S s u b − l ) w \kappa' \notin (S_{sub}-l)w κ′∈/(Ssub−l)w,则有 B ( κ ′ ) = 0 B(\kappa')=0 B(κ′)=0。用于感知分析的第 i i i 个 RS 符号的频域序列,长度为 N − ( ⌊ N l / S s u b ⌋ ) N - (\lfloor Nl/S_{sub} \rfloor) N−(⌊Nl/Ssub⌋) 可以被重组为原始长度为 N N N 的序列 X ′ i \mathbf{X'}_i X′i。对于 B ( κ ′ ) ≠ 0 B(\kappa') \ne 0 B(κ′)=0 的情况,我们进行映射 X i ′ ( ( κ ′ S s u b / ( S s u b − l ) ) + F i ) = B ( κ ′ ) X'_i((\kappa'S_{sub}/(S_{sub}-l)) + F_i) = B(\kappa') Xi′((κ′Ssub/(Ssub−l))+Fi)=B(κ′)。对于 ( κ ′ S s u b / ( S s u b − l ) ) + F i (\kappa' S_{sub} / (S_{sub}-l)) + F_i (κ′Ssub/(Ssub−l))+Fi 之外的 RE 位置, X ′ i \mathbf{X'}_i X′i 将被补零。因此, X ′ i \mathbf{X'}_i X′i 可被进一步简化为
X i ′ ( κ 1 ) = ∑ h = 0 H − 1 α h ( S s u b − l ) S s u b ⋅ X i ( κ 1 ) e j 2 π f h i T s y m e − j 2 π τ h κ 1 T s . (13) X'_i(\kappa_1) = \sum_{h=0}^{H-1} \alpha_h \frac{(S_{sub}-l)}{S_{sub}} \cdot X_i(\kappa_1) e^{j2\pi f_h i T_{sym}} e^{-j\frac{2\pi\tau_h\kappa_1}{T_s }}. \tag{13} Xi′(κ1)=h=0∑H−1αhSsub(Ssub−l)⋅Xi(κ1)ej2πfhiTsyme−jTs2πτhκ1.(13)
- 定义索引映射关系
推导的核心是从处理后的频域索引 κ ′ \kappa' κ′ 映射回原始的子载波索引 κ 1 \kappa_1 κ1。根据文中的映射规则,我们定义此变量代换关系为:
κ 1 = κ ′ S s u b S s u b − l + F i \kappa_1 = \frac{\kappa'S_{sub}}{S_{sub}-l} + F_i κ1=Ssub−lκ′Ssub+Fi
这个关系式是将两个公式联系起来的桥梁。- 执行映射指令
文中的重组指令为,对于 B ( κ ′ ) ≠ 0 B(\kappa') \ne 0 B(κ′)=0 的位置,进行映射:
X i ′ ( κ ′ S s u b S s u b − l + F i ) = B ( κ ′ ) X'_i\left(\frac{\kappa'S_{sub}}{S_{sub}-l} + F_i\right) = B(\kappa') Xi′(Ssub−lκ′Ssub+Fi)=B(κ′)
使用步骤1中定义的 κ 1 \kappa_1 κ1,上式可简化为 X i ′ ( κ 1 ) = B ( κ ′ ) X'_i(\kappa_1) = B(\kappa') Xi′(κ1)=B(κ′)。现在,我们将公式 (12) 的完整表达式代入 B ( κ ′ ) B(\kappa') B(κ′):
X i ′ ( κ 1 ) = ∑ h = 0 H − 1 α h S s u b − l S s u b ⋅ X i ( κ ′ S s u b S s u b − l + F i ) ⋅ e j 2 π f h i T s y m e − j 2 π τ h T s N ( κ ′ S s u b S s u b − l + F i ) X'_i(\kappa_1) = \sum_{h=0}^{H-1} \alpha_h \frac{S_{sub}-l}{S_{sub}} \cdot X_i\left(\frac{\kappa'S_{sub}}{S_{sub}-l} + F_i\right) \cdot e^{j2\pi f_h i T_{sym}} e^{-j2\pi \frac{\tau_h}{T_s N}\left(\frac{\kappa' S_{sub}}{S_{sub}-l} + F_i\right)} Xi′(κ1)=h=0∑H−1αhSsubSsub−l⋅Xi(Ssub−lκ′Ssub+Fi)⋅ej2πfhiTsyme−j2πTsNτh(Ssub−lκ′Ssub+Fi)- 进行变量代换并得到结果
观察上一步得到的等式,我们发现其右侧有两个复杂的索引表达式,而它们都完全等于我们在步骤1中定义的 κ 1 \kappa_1 κ1。我们用 κ 1 \kappa_1 κ1 将它们替换掉:
- X i ( κ ′ S s u b S s u b − l + F i ) X_i\left(\frac{\kappa'S_{sub}}{S_{sub}-l} + F_i\right) Xi(Ssub−lκ′Ssub+Fi) 变为 X i ( κ 1 ) X_i(\kappa_1) Xi(κ1)
- e − j 2 π τ h T s N ( κ ′ S s u b S s u b − l + F i ) e^{-j2\pi \frac{\tau_h}{T_s N}\left(\frac{\kappa' S_{sub}}{S_{sub}-l} + F_i\right)} e−j2πTsNτh(Ssub−lκ′Ssub+Fi) 变为 e − j 2 π τ h κ 1 T s N e^{-j\frac{2\pi\tau_h\kappa_1}{T_s N}} e−jTsN2πτhκ1
完成代换后,即可得到公式 (13):
X i ′ ( κ 1 ) = ∑ h = 0 H − 1 α h ( S s u b − l ) S s u b ⋅ X i ( κ 1 ) e j 2 π f h i T s y m e − j 2 π τ h κ 1 T s N X'_i(\kappa_1) = \sum_{h=0}^{H-1} \alpha_h \frac{(S_{sub}-l)}{S_{sub}} \cdot X_i(\kappa_1) e^{j2\pi f_h i T_{sym}} e^{-j\frac{2\pi\tau_h\kappa_1}{T_s N}} Xi′(κ1)=h=0∑H−1αhSsub(Ssub−l)⋅Xi(κ1)ej2πfhiTsyme−jTsN2πτhκ1
- 完成重组(补零)
上述推导仅适用于非零的子载波位置 κ 1 \kappa_1 κ1。根据重组定义,对于长为 N N N 的序列 X ′ i \mathbf{X'}_i X′i 中的所有其他位置,均用零填充。至此,从短序列 B \mathbf{B} B 到长序列 X ′ i \mathbf{X'}_i X′i 的重组过程及其数学表达的推导全部完成。
其中 κ 1 = 0 , 1 , … , N − 1 \kappa_1 = 0, 1, \dots, N-1 κ1=0,1,…,N−1。因此,无 ISI 的最大时延为 min ( T c p + ( l T s / S s u b ) , T s ) \min(T_{cp} + (lT_s/S_{sub}), T_s) min(Tcp+(lTs/Ssub),Ts),它由分数符号索引 l l l 参数化。请注意,对于 l l l 的不同选择,在信号能量损失和最大时延之间存在一个权衡。更大的 l l l 可以支持更大的无 ISI 时延估计,但用于感知算法分析的信号能量则会更低。图 9 展示了一个 l = S s u b − 1 l=S_{sub}-1 l=Ssub−1 且 S s u b = 4 S_{sub}=4 Ssub=4 的实例。
V. EAP OF 2-D FFT
对于二维 FFT,其结论与 延迟求和 (Delay-and-Sum) 类似,例外之处在于,由于离散时间傅里叶变换带来的频域混叠,旁瓣会出现在 ( 0 , ± [ 1 / T ] ) (0, \pm[1/T]) (0,±[1/T]) 的位置。二维 FFT 的优势在于它不需要特殊的时间序列,因为后置 FFT 传感算法可以通过频域标量除法对接收信号进行解扰,而无需去相关。除了不受加扰序列属性的影响外,二维 FFT 还通过交错梳状模式来消除旁瓣,这与 延迟求和 的做法相似。基于公式 (13),二维 FFT 算法对一个由 M M M 个解扰后的后置 FFT OFDM 符号组成的序列 { X R , i } i = 0 M − 1 \{X_{R,i}\}_{i=0}^{M-1} {XR,i}i=0M−1 执行第二次 FFT 操作,其中 X R , i X_{R,i} XR,i 的第 κ 1 \kappa_1 κ1 个元素是
X R , i ( κ 1 ) = { S s u b , X i ′ ( κ 1 ) ( S s u b − l ) i ( κ 1 ) = ∑ h = 0 H − 1 α h e j 2 π f h i S s y m e − j 2 π τ h κ 1 T s X i ′ ( κ 1 ) ≠ 0 0 , otherwise (14) X_{R,i}(\kappa_1) = \begin{cases} \frac{S_{sub,X'_i}(\kappa_1)}{(S_{sub-l})_i(\kappa_1)} = \sum_{h=0}^{H-1} \alpha_h e^{j2\pi f_h i S_{sym}} e^{-j2\pi \frac{\tau_h \kappa_1}{T_s}} & X'_i(\kappa_1) \neq 0 \\ 0, & \text{otherwise} \end{cases} \tag{14} XR,i(κ1)={(Ssub−l)i(κ1)Ssub,Xi′(κ1)=∑h=0H−1αhej2πfhiSsyme−j2πTsτhκ10,Xi′(κ1)=0otherwise(14)
对于 κ 1 = 0 , 1 , … , N − 1 \kappa_1 = 0, 1, \dots, N-1 κ1=0,1,…,N−1。在不失一般性的情况下 (WLOG),我们设定目标数量 H H H 为 1 来推导 二维 FFT 的结果。那么,二维 FFT 的等效孔径模式 (EAP) 可以写为
P ( g , q ) = ∣ ∑ κ 1 = 0 N − 1 ( ∑ i = 0 M − 1 X R , i ( κ 1 ) e − j 2 π q i S s y m M ) e j 2 π g κ 1 N ∣ 2 = ∣ ∑ k = 0 N / S s u b − 1 β 1 ( g , k ) ⋅ ∑ i = 0 M − 1 β 2 ( g , q , i ) ∣ 2 (15) P(g, q) = \left| \sum_{\kappa_1=0}^{N-1} \left( \sum_{i=0}^{M-1} X_{R,i}(\kappa_1) e^{-j2\pi \frac{qiS_{sym}}{M}} \right) e^{j2\pi \frac{g\kappa_1}{N}} \right|^2 \\ = \left| \sum_{k=0}^{N/S_{sub}-1} \beta_1(g, k) \cdot \sum_{i=0}^{M-1} \beta_2(g, q, i) \right|^2 \tag{15} P(g,q)= κ1=0∑N−1(i=0∑M−1XR,i(κ1)e−j2πMqiSsym)ej2πNgκ1 2= k=0∑N/Ssub−1β1(g,k)⋅i=0∑M−1β2(g,q,i) 2(15)
VI. EAP OF COMB RS USING SUPER-RESOLUTION ALGORITHMS
为了同时检测目标的速度和距离,我们在此利用 二维 MUSIC 和 二维 IAA 作为超分辨率传感算法的示例。基于前一节的公式 (14),在经过 FFT 和解扰之后,我们将单个快照中 M M M 个 RS (参考信号) 符号的接收信号矩阵设为
F = ( X R , 0 ( 0 ) ⋯ X R , M − 1 ( 0 ) ⋮ ⋱ ⋮ X R , 0 ( N − 1 ) ⋯ X R , M − 1 ( N − 1 ) ) (20) \mathbf{F} = \begin{pmatrix} X_{R,0}(0) & \cdots & X_{R,M-1}(0) \\ \vdots & \ddots & \vdots \\ X_{R,0}(N-1) & \cdots & X_{R,M-1}(N-1) \end{pmatrix} \tag{20} F= XR,0(0)⋮XR,0(N−1)⋯⋱⋯XR,M−1(0)⋮XR,M−1(N−1) (20)
对于 二维 MUSIC 或 二维 IAA [26], [27], [28], [29],在单个快照中,我们将矩阵 F \mathbf{F} F 向量化为 A = vec ( F ) \mathbf{A} = \text{vec}(\mathbf{F}) A=vec(F)。设 S \mathbf{S} S 是目标复值系数的向量, W \mathbf{W} W 是我们想要估计的导向矩阵 (它在快照之间不发生变化),我们可以写出 A = W S + N ′ \mathbf{A} = \mathbf{W}\mathbf{S} + \mathbf{N'} A=WS+N′,其中 N ′ \mathbf{N'} N′ 是向量化的噪声,而 S = [ α 0 … α H − 1 ] T \mathbf{S} = [\alpha_0 \dots \alpha_{H-1}]^T S=[α0…αH−1]T 是目标的复系数向量。导向矩阵 W \mathbf{W} W 的第 h h h 列可以写为
w h 1 ( f h , τ h ) = [ e − j 2 π ( 0 ⋅ S s u b + F 0 ) τ T s e j 2 π 0 ⋅ S s y m T f h e − j 2 π ( S s u b + F 0 ) τ T s e j 2 π 0 ⋅ S s y m T f h ⋮ e − j 2 π ( ( N − 1 ) ⋅ S s u b + F 0 ) τ T s e j 2 π 0 ⋅ S s y m T f h ⋮ e − j 2 π ( 0 ⋅ S s u b + F M − 1 ) τ T s e j 2 π ( M − 1 ) ⋅ S s y m T f h e − j 2 π ( S s u b + F M − 1 ) τ T s e j 2 π ( M − 1 ) ⋅ S s y m T f h ⋮ e − j 2 π ( ( N − 1 ) S s u b + F M − 1 ) τ T s e j 2 π ( M − 1 ) ⋅ S s y m T f h ] . (21) \boldsymbol{w}_{h 1}\left(f_{h}, \tau_{h}\right)=\left[\begin{array}{c} e^{-\frac{j 2 \pi\left(0 \cdot S_{\mathrm{sub}}+F_{0}\right) \tau}{T_{s}}} e^{j 2 \pi 0 \cdot S_{\mathrm{sym}} T f_{h}} \\ e^{-\frac{j 2 \pi\left(S_{\mathrm{sub}}+F_{0}\right) \tau}{T_{s}}} e^{j 2 \pi 0 \cdot S_{\mathrm{sym}} T f_{h}} \\ \vdots \\ e^{-\frac{j 2 \pi\left((N-1) \cdot S_{\mathrm{sub}}+F_{0}\right) \tau}{T_{s}}} e^{j 2 \pi 0 \cdot S_{\mathrm{sym}} T f_{h}} \\ \vdots \\ e^{-\frac{j 2 \pi\left(0 \cdot S_{\mathrm{sub}}+F_{M-1}\right) \tau}{T_{s}}} e^{j 2 \pi(M-1) \cdot S_{\mathrm{sym}} T f_{h}} \\ e^{-\frac{j 2 \pi\left(S_{\mathrm{sub}}+F_{M-1}\right) \tau}{T_{s}}} e^{j 2 \pi(M-1) \cdot S_{\mathrm{sym}} T f_{h}} \\ \vdots \\ e^{-\frac{j 2 \pi\left((N-1) S_{\mathrm{sub}}+F_{M-1}\right) \tau}{T_{s}}} e^{j 2 \pi(M-1) \cdot S_{\mathrm{sym}} T f_{h}} \end{array}\right] . \tag{21} wh1(fh,τh)= e−Tsj2π(0⋅Ssub+F0)τej2π0⋅SsymTfhe−Tsj2π(Ssub+F0)τej2π0⋅SsymTfh⋮e−Tsj2π((N−1)⋅Ssub+F0)τej2π0⋅SsymTfh⋮e−Tsj2π(0⋅Ssub+FM−1)τej2π(M−1)⋅SsymTfhe−Tsj2π(Ssub+FM−1)τej2π(M−1)⋅SsymTfh⋮e−Tsj2π((N−1)Ssub+FM−1)τej2π(M−1)⋅SsymTfh .(21)
当 w h 1 ( f , τ ) = w h 1 ( f ′ , τ ′ ) \mathbf{w}_{h1}(f, \tau) = \mathbf{w}_{h1}(f', \tau') wh1(f,τ)=wh1(f′,τ′) 且 ( f , τ ) ≠ ( f ′ , τ ′ ) (f, \tau) \neq (f', \tau') (f,τ)=(f′,τ′) 时,会因混叠 (aliasing) 而产生模糊性。接下来,我们将讨论 RS 模式的几种情况及其 EAP (等效孔径模式)。
A. Scheme A—Patterns Similar to 5G PDCCH DMRS or TRS
如果对于任意第 i i i 个 RS 符号, F i F_i Fi 是恒定的,那么当以下条件成立时会发生模糊性
e − j ( 2 π ( k ⋅ S s u b ) T s ) τ ′ e j 2 π i ⋅ S s y m T f ′ = e − j ( 2 π ( k ⋅ S s u b ) T s ) τ e j 2 π i ⋅ S s y m T f (22) e^{-j\left(\frac{2\pi(k \cdot S_{sub})}{T_s}\right)\tau'} e^{j2\pi i \cdot S_{sym} T f'} = e^{-j\left(\frac{2\pi(k \cdot S_{sub})}{T_s}\right)\tau} e^{j2\pi i \cdot S_{sym} T f} \tag{22} e−j(Ts2π(k⋅Ssub))τ′ej2πi⋅SsymTf′=e−j(Ts2π(k⋅Ssub))τej2πi⋅SsymTf(22)
对于所有的 k = 0 , 1 , … , N − 1 k = 0, 1, \dots, N-1 k=0,1,…,N−1 和 i = 0 , 1 , … , M − 1 i = 0, 1, \dots, M-1 i=0,1,…,M−1。从 (22) 可知,该条件等效于 τ ′ = τ + ( ⌊ k 1 T s ⌋ / S s u b ) \tau' = \tau + (\lfloor k_1 T_s \rfloor / S_{sub}) τ′=τ+(⌊k1Ts⌋/Ssub) 和 f ′ = f + ⌊ k 2 / ( S s y m T ) ⌋ f' = f + \lfloor k_2/(S_{sym}T) \rfloor f′=f+⌊k2/(SsymT)⌋,其中 τ \tau τ 和 f f f 分别是真实的延迟和多普勒,而 ( k 1 , k 2 ) (k_1, k_2) (k1,k2) 是任意整数对。
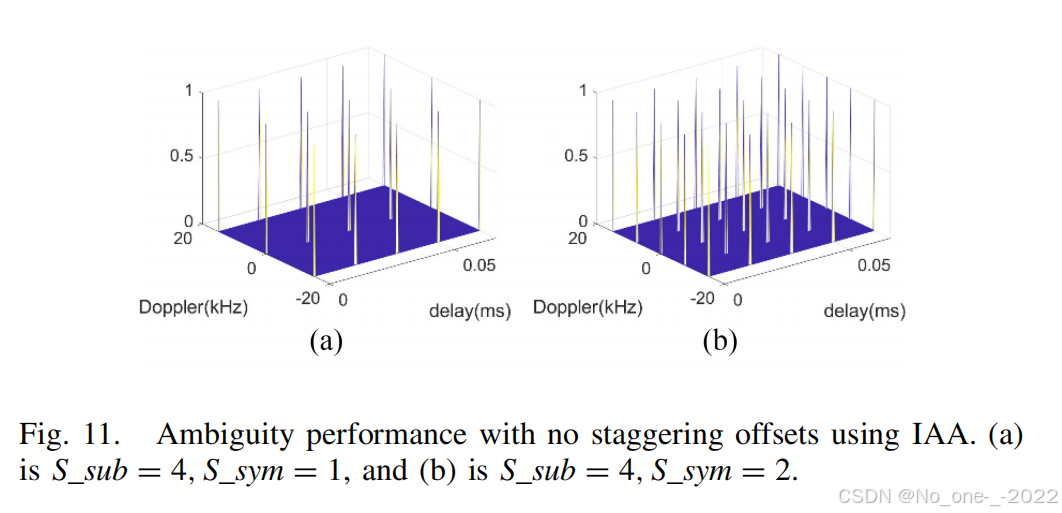
图 11(a) 展示了在没有交错、子载波间隔 (SCS) 为 15kHz 的情况下,当 S s y m = 1 , S s u b = 4 S_{sym}=1, S_{sub}=4 Ssym=1,Ssub=4 且真实延迟和多普勒对为 ( 0 , 0 ) (0,0) (0,0) 时,二维 IAA 的 EAP (等效孔径模式)。最大无模糊延迟被限制为 ( T s / S s u b ) (T_s/S_{sub}) (Ts/Ssub)。图 11(b) 显示了 S s y m = 2 , S s u b = 4 S_{sym}=2, S_{sub}=4 Ssym=2,Ssub=4 时的 EAP。总的来说,旁瓣位置与 二维 FFT 相同,但分辨率更高。
交错方案 D 被定义为一种线性斜率的交错偏移,使得 F i = mod ( p ⋅ i + β 1 , S s u b ) F_i = \text{mod}(p \cdot i + \beta_1, S_{sub}) Fi=mod(p⋅i+β1,Ssub),其中 p p p 与 S s u b S_{sub} Ssub 互质,且 β 1 ∈ { 0 , 1 , … , S s u b − 1 } \beta_1 \in \{0, 1, \dots, S_{sub}-1\} β1∈{0,1,…,Ssub−1},适用于 i = 0 , … , M − 1 i = 0, \dots, M-1 i=0,…,M−1。当以下条件成立时,会发生模糊性
e − j ( 2 π ( k ⋅ S s u b + i p ) T s ) τ ′ e j 2 π i ⋅ S s y m T f ′ = e − j ( 2 π ( k ⋅ S s u b + i p ) T s ) τ e j 2 π i ⋅ S s y m T f (23) e^{-j\left(\frac{2\pi(k \cdot S_{sub} + ip)}{T_s}\right)\tau'} e^{j2\pi i \cdot S_{sym} T f'} = e^{-j\left(\frac{2\pi(k \cdot S_{sub} + ip)}{T_s}\right)\tau} e^{j2\pi i \cdot S_{sym} T f} \tag{23} e−j(Ts2π(k⋅Ssub+ip))τ′ej2πi⋅SsymTf′=e−j(Ts2π(k⋅Ssub+ip))τej2πi⋅SsymTf(23)
对于所有的 k = 0 , 1 , … , N − 1 k=0, 1, \dots, N-1 k=0,1,…,N−1 和所有的 i = 0 , 1 , … , M − 1 i=0, 1, \dots, M-1 i=0,1,…,M−1。从 (23) 我们可以得出结论,模糊性发生在 τ ′ = τ + ( ⌊ k 1 T s ⌋ / S s u b ) \tau' = \tau + (\lfloor k_1 T_s \rfloor / S_{sub}) τ′=τ+(⌊k1Ts⌋/Ssub) 和 f ′ = f + ( k 2 / ⌊ S s y m T ⌋ ) + ( p k 1 / ⌊ S s u b S s y m T ⌋ ) f' = f + (k_2/\lfloor S_{sym}T \rfloor) + (pk_1/\lfloor S_{sub}S_{sym}T \rfloor) f′=f+(k2/⌊SsymT⌋)+(pk1/⌊SsubSsymT⌋),其中 ( k 1 , k 2 ) (k_1, k_2) (k1,k2) 是任意整数,而 ( τ , f ) (\tau, f) (τ,f) 是真实的 (延迟,多普勒频率) 对。图 3 展示了在使用 交错方案 A 的情况下,当 S s y m = 1 , S s u b = 4 S_{sym}=1, S_{sub}=4 Ssym=1,Ssub=4 且真实 (延迟,多普勒) 对为 ( 0 , 0 ) (0,0) (0,0) 时,使用 二维 IAA 的 EAP。图 11(b) 和 12(a) 分别显示了 p = 1 p=1 p=1 和 p = 3 p=3 p=3 的结果。旁瓣位置也与 二维 FFT 相同。
B. Scheme D—Linear-Slope-Relatively Prime-to-Comb-Size Staggering

开源鸿蒙跨平台开发社区汇聚开发者与厂商,共建“一次开发,多端部署”的开源生态,致力于降低跨端开发门槛,推动万物智联创新。
更多推荐

 11
11 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)