SAE J2847_2:2015电动汽车与直流充电桩通信协议详解
SAE J2847_2是由美国汽车工程师学会(SAE International)制定的一项通信协议标准,主要用于规范插电式电动汽车(PEV)与外部充电设备之间的数据交互过程。该标准的制定旨在实现不同厂商设备间的互操作性,提升充电系统的兼容性与安全性。它与国际标准ISO 15118、IEEE 2030.5等密切相关,构成了电动汽车充电通信协议体系的重要组成部分。

简介:SAE J2847_2:2015是由美国汽车工程师学会制定的标准,定义了插电式电动汽车与直流充电桩之间的通信协议,涵盖物理层、数据链路层和应用层,确保充电过程的安全性与互操作性。该标准详细描述了充电初始化、监控、中断处理及结束阶段的流程,并致力于推动不同厂商设备之间的兼容。适用于电动汽车通信系统开发与测试,是理解和实现EV充电通信的重要技术文档。 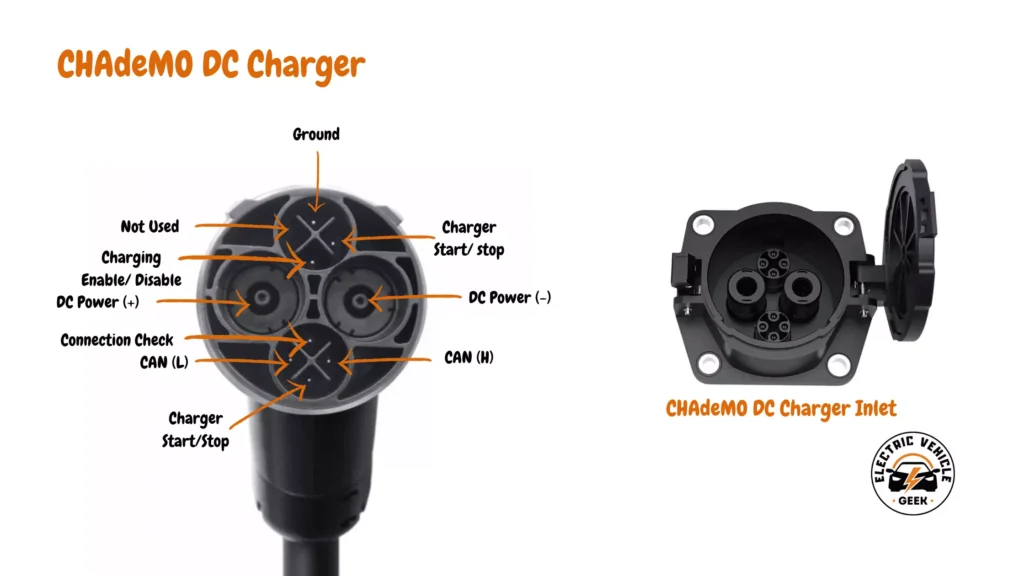
1. SAE J2847_2标准概述
SAE J2847_2是由美国汽车工程师学会(SAE International)制定的一项通信协议标准,主要用于规范插电式电动汽车(PEV)与外部充电设备之间的数据交互过程。该标准的制定旨在实现不同厂商设备间的互操作性,提升充电系统的兼容性与安全性。它与国际标准ISO 15118、IEEE 2030.5等密切相关,构成了电动汽车充电通信协议体系的重要组成部分。
该标准不仅定义了通信过程中的数据格式、交互流程和安全机制,还涵盖了即插即充、身份认证、计费信息传输等关键功能,为实现智能电网与电动汽车之间的高效协同提供了技术基础。随着全球电动汽车保有量的持续增长,SAE J2847_2在推动充电基础设施标准化、提升用户体验和保障充电安全方面发挥着日益重要的作用。
2. 插电式电动汽车与直流充电桩通信协议架构
2.1 通信协议的整体架构
2.1.1 协议分层模型
在SAE J2847/2标准中,插电式电动汽车(PEV)与直流充电桩(EVSE)之间的通信协议采用分层结构设计,确保数据传输的稳定性、兼容性和扩展性。该协议模型主要参考OSI(开放系统互连)七层模型中的物理层、数据链路层和应用层,结合电动汽车充电通信的特殊需求,构建出三层通信架构。
该协议的分层结构如下:
| 层级 | 层名 | 功能描述 |
|---|---|---|
| L1 | 物理层 | 负责电气连接与信号传输,定义物理接口和通信速率,例如CAN或以太网 |
| L2 | 数据链路层 | 提供帧格式定义、差错检测、流量控制等功能,确保可靠的数据传输 |
| L3 | 应用层 | 定义充电控制逻辑、数据交换格式、状态报告机制等,实现PEV与EVSE之间的功能交互 |
每一层之间通过标准化接口进行数据交换,确保上层应用逻辑与底层通信机制的解耦。这种设计使得通信协议具备良好的可移植性,能够适应不同的物理通信介质(如CAN、以太网)以及不同的充电协议(如CCS、GB/T)。
2.1.2 各层功能概述
物理层(L1)
物理层负责将数据转换为电信号进行传输。在直流快充场景中,常用的物理层技术包括:
- CAN总线 :广泛应用于低速通信场景,具有成本低、抗干扰能力强的特点。
- 以太网 :适用于高速充电通信,支持更高的带宽和更低的延迟。
物理层的主要参数包括:
- 通信速率(如250 kbps、500 kbps、1 Mbps等)
- 信号电平定义
- 接口类型(如Type-C、DB9等)
数据链路层(L2)
数据链路层负责构建数据帧结构、执行差错检测(如CRC)、实现帧同步,并提供流量控制机制。其关键功能包括:
- 帧格式定义 :数据包的起始位、标识符、数据长度、数据字段、校验字段等。
- 差错控制 :通过CRC校验确保数据的完整性。
- 帧同步 :确保发送端与接收端的数据帧对齐。
例如,CAN协议中数据帧的基本结构如下:
typedef struct {
uint32_t id; // 帧ID
uint8_t dlc; // 数据长度码
uint8_t data[8]; // 数据字段
} CAN_Frame;
参数说明:
-id:标识符,用于标识数据帧的优先级和功能类型。
-dlc:表示数据字段的字节数,最大为8。
-data:有效数据字段,用于承载应用层信息。
应用层(L3)
应用层是整个通信协议的核心,它负责定义PEV与EVSE之间的交互逻辑,包括:
- 充电请求的发起与响应
- 实时充电状态的上报(如电压、电流、温度)
- 参数协商机制(如最大充电电流、电压限制等)
应用层的数据交换通常采用预定义的消息格式,例如:
{
"MessageType": "ChargeRequest",
"VehicleID": "V123456",
"MaxCurrent": 200,
"MaxVoltage": 400,
"Timestamp": "2025-04-05T12:34:56Z"
}
参数说明:
-MessageType:消息类型,如充电请求、状态报告、参数协商等。
-VehicleID:车辆唯一识别码。
-MaxCurrent:车辆可接受的最大充电电流(单位:A)。
-MaxVoltage:车辆可接受的最大充电电压(单位:V)。
-Timestamp:时间戳,用于数据同步与状态追踪。
协议交互流程图(mermaid)
sequenceDiagram
PEV->>EVSE: 充电请求 (Charge Request)
EVSE->>PEV: 响应 (Accept/Reject)
PEV->>EVSE: 参数协商 (Negotiate Parameters)
EVSE->>PEV: 确认参数 (Confirm Parameters)
loop 实时状态上报
PEV->>EVSE: 状态报告 (Voltage, Current, Temp)
end
PEV->>EVSE: 充电结束通知 (Charge Complete)
流程说明:
1. 充电请求 :PEV向EVSE发送充电请求,包含基本车辆信息和初始参数。
2. 响应机制 :EVSE根据当前状态(如功率容量)决定是否接受请求。
3. 参数协商 :双方协商充电参数,确保安全和高效充电。
4. 状态报告 :充电过程中,PEV持续上报实时状态,供EVSE监控和调节。
5. 充电结束 :当电量充满或用户终止时,PEV通知EVSE结束充电。
2.2 通信协议的数据流设计
2.2.1 数据流向与处理机制
在SAE J2847/2标准中,PEV与EVSE之间的数据流向分为 上行通信 和 下行通信 两类:
- 上行通信(PEV → EVSE) :主要包括充电请求、状态报告、参数变更请求等。
- 下行通信(EVSE → PEV) :主要包括响应信息、参数确认、控制指令等。
数据流向的处理机制如下:
- 数据采集 :PEV内部BMS(电池管理系统)采集电池状态数据(电压、电流、SOC等)。
- 数据封装 :按照应用层协议封装成结构化数据包。
- 数据传输 :通过数据链路层进行帧封装,并通过物理层完成传输。
- 数据解析 :接收方解析数据包,提取关键信息进行处理。
- 反馈与控制 :根据数据内容,EVSE可动态调整输出功率或发送控制指令。
以下是一个数据流处理的简化代码示例(使用C语言):
void process_uplink_data(uint8_t *raw_data, size_t len) {
// 解析应用层数据
AppLayerData *app_data = parse_app_layer(raw_data, len);
if (app_data->type == CHARGE_REQUEST) {
// 处理充电请求
handle_charge_request(app_data);
} else if (app_data->type == STATUS_REPORT) {
// 处理状态报告
handle_status_report(app_data);
} else if (app_data->type == PARAM_NEGOTIATION) {
// 处理参数协商
handle_param_negotiation(app_data);
}
// 释放内存
free(app_data);
}
逻辑分析:
-raw_data是接收到的原始数据帧。
-parse_app_layer函数负责从数据帧中提取应用层数据。
- 根据数据类型(CHARGE_REQUEST,STATUS_REPORT,PARAM_NEGOTIATION)调用不同的处理函数。
- 最后释放内存,避免内存泄漏。
数据流向示意图(mermaid)
graph LR
A[PEV] -->|上行数据| B(EVSE)
B -->|下行数据| A
A --> C[车载BMS]
C --> D[数据采集]
D --> E[应用层封装]
E --> F[链路层封装]
F --> G[物理层传输]
G --> H[EVSE接收]
H --> I[链路层解析]
I --> J[应用层处理]
J --> K[反馈控制]
说明:
- 数据从PEV内部的BMS采集,经过应用层、链路层和物理层封装后传输至EVSE。
- EVSE接收后逐层解析,执行相应的控制逻辑。
- 控制结果通过下行数据反馈给PEV,实现闭环控制。
2.2.2 关键数据节点定义
在PEV与EVSE通信中,以下是一些关键的数据节点定义及其作用:
| 数据节点 | 作用 | 示例值 |
|---|---|---|
| VehicleID | 唯一标识车辆 | V123456 |
| MaxCurrent | 最大允许充电电流 | 200A |
| MaxVoltage | 最大允许充电电压 | 400V |
| BatterySOC | 当前电池荷电状态 | 50% |
| BatteryTemp | 电池温度 | 25°C |
| ChargerStatus | 充电桩状态 | Charging / Standby |
| ErrorFlag | 错误标志位 | 0x00(无错误) |
这些关键数据节点构成了通信协议中数据交换的基础,确保PEV与EVSE之间的信息交互具备完整性与准确性。
2.3 通信接口的标准化要求
2.3.1 物理连接接口规范
SAE J2847/2标准对PEV与EVSE之间的物理连接接口提出了严格的标准化要求,以确保互操作性、安全性和可靠性。主要接口规范包括:
- 连接器类型 :如SAE J1772规定的Type 1(北美)和Type 2(欧洲)交流充电接口,以及CCS Combo接口(直流快充)。
- 通信引脚定义 :规定了CAN_H、CAN_L、PE(保护地)等信号引脚的分配。
- 机械锁定机制 :防止充电过程中连接器意外脱落。
例如,CCS Combo接口的引脚定义如下:
| 引脚编号 | 信号名称 | 功能描述 |
|---|---|---|
| 1~2 | AC Power | 交流供电 |
| 3~4 | DC Power | 直流供电 |
| 5~6 | CAN_H / CAN_L | CAN通信 |
| 7~8 | Control Pilot | 控制导引信号 |
| 9~10 | Proximity Detection | 插枪检测 |
2.3.2 通信速率与信号定义
通信速率是物理层通信质量的重要指标,SAE J2847/2标准中定义的通信速率应满足以下要求:
- CAN通信速率 :通常为250 kbps或500 kbps,适用于中低速通信。
- 以太网通信速率 :支持10 Mbps、100 Mbps,甚至1 Gbps,适用于高速数据交换。
信号定义方面,主要包括:
- 电压电平 :如CAN通信中CAN_H为2.5~3.5V,CAN_L为1.5~2.5V。
- 信号完整性 :要求信号传输中无明显干扰、抖动或衰减。
- 差分信号对 :如CAN_H与CAN_L为差分信号对,提升抗干扰能力。
以下是一个CAN通信速率配置示例代码(基于STM32 HAL库):
CAN_HandleTypeDef hcan;
void MX_CAN_Init(void)
{
hcan.Instance = CAN1;
hcan.Init.Prescaler = 6; // 分频系数
hcan.Init.Mode = CAN_MODE_NORMAL; // 正常模式
hcan.Init.SyncJumpWidth = CAN_SJW_1TQ;
hcan.Init.TimeSeg1 = CAN_BS1_13TQ; // 段1长度
hcan.Init.TimeSeg2 = CAN_BS2_2TQ; // 段2长度
hcan.Init.TimeTriggeredMode = DISABLE;
hcan.Init.AutoBusOff = ENABLE;
hcan.Init.AutoWakeUp = ENABLE;
hcan.Init.AutoRetransmission = ENABLE;
hcan.Init.ReceiveFifoLocked = DISABLE;
hcan.Init.TransmitFifoPriority = DISABLE;
if (HAL_CAN_Init(&hcan) != HAL_OK)
{
Error_Handler();
}
}
参数说明:
-Prescaler:CAN时钟分频系数,影响通信速率。
-Mode:通信模式,如正常模式、回环模式等。
-TimeSeg1和TimeSeg2:定义位时间的段长度,影响通信稳定性。
-AutoRetransmission:自动重传功能,提高数据可靠性。
通信速率与信号电平关系图(表格)
| 通信速率 | CAN_H电平范围 | CAN_L电平范围 | 信号差(CAN_H - CAN_L) |
|---|---|---|---|
| 250 kbps | 2.5V ~ 3.5V | 1.5V ~ 2.5V | 1V(典型) |
| 500 kbps | 2.5V ~ 3.5V | 1.5V ~ 2.5V | 1V(典型) |
| 1 Mbps | 2.5V ~ 3.5V | 1.5V ~ 2.5V | 1V(典型) |
说明:
- CAN通信中,CAN_H与CAN_L之间的差值决定了逻辑电平。
- 高速率下对信号完整性要求更高,需注意布线和屏蔽设计。
本章从协议架构、数据流设计到接口规范,系统性地解析了SAE J2847/2标准下PEV与直流充电桩之间的通信协议结构,为后续章节中物理层、数据链路层及应用层的深入分析打下基础。
3. 物理层通信技术(如CAN或以太网)
在电动汽车与直流充电桩之间的通信中,物理层承担着数据传输的基础支撑角色。其稳定性、实时性与抗干扰能力直接决定了整个通信系统的可靠性与效率。本章将重点探讨两种主流物理层通信技术——CAN总线和以太网——在充电通信中的应用,分析其原理、实现方式以及可靠性设计策略。
3.1 CAN总线通信技术
控制器局域网(Controller Area Network, CAN)是一种广泛应用于汽车电子系统中的串行通信协议。它具备高可靠性、实时性强和抗干扰能力强的特点,因此在电动汽车与直流充电桩的通信中被广泛采用。
3.1.1 CAN协议的基本原理
CAN协议由Bosch公司于1986年推出,主要用于汽车内部各电子控制单元(ECU)之间的通信。其核心思想是采用广播式通信和优先级仲裁机制,确保关键数据能够及时传输。
CAN协议的基本特点包括:
| 特性 | 描述 |
|---|---|
| 通信方式 | 差分信号传输,双线结构 |
| 数据帧类型 | 数据帧、远程帧、错误帧、过载帧 |
| 传输速率 | 最高可达1 Mbps(标准CAN) |
| 仲裁机制 | 非破坏性位仲裁 |
| 通信距离 | 最长可达10 km(低速模式) |
| 节点数量 | 支持多主节点通信,理论上可达110个节点 |
CAN协议的数据帧结构如下:
+----------------+-------------+-------------------+-------------+-----------------+
| 帧起始(SOF) | 标识符(ID) | 控制字段(RTR, IDE) | 数据字段(0~8字节) | CRC字段 | ACK字段 | 帧结束(EOF) |
+----------------+-------------+-------------------+-------------+-----------------+
- SOF(Start of Frame) :标识帧的开始,为显性位。
- ID(Identifier) :决定帧的优先级,标准帧为11位,扩展帧为29位。
- RTR(Remote Transmission Request) :指示该帧是否为请求帧。
- IDE(Identifier Extension Bit) :标识是否为扩展帧。
- 数据字段 :实际传输的数据内容,长度为0~8字节。
- CRC(Cyclic Redundancy Check) :用于差错校验。
- ACK(Acknowledgment) :接收方确认接收成功。
- EOF(End of Frame) :标识帧的结束。
3.1.2 CAN在充电通信中的应用实例
在SAE J2847_2标准中,CAN总线被用于电动汽车与直流充电桩之间的通信,主要传输充电参数、状态信息和控制指令。以下是典型的应用流程:
- 连接检测 :车辆连接至充电桩后,CAN控制器开始初始化通信。
- 身份识别 :充电桩发送身份识别帧,车辆响应并确认支持的协议版本。
- 参数协商 :双方通过CAN帧交换最大充电电流、电压等参数。
- 状态监控 :在充电过程中,车辆定期发送状态信息,包括电池SOC、温度、充电电流等。
- 异常处理 :若检测到异常(如过温、过流),车辆通过CAN帧发送中断请求,充电桩立即响应。
下面是一个CAN帧在充电通信中的示例代码(使用SocketCAN库):
#include <linux/can.h>
#include <linux/can/raw.h>
#include <sys/socket.h>
#include <netinet/in.h>
#include <stdio.h>
#include <stdlib.h>
#include <string.h>
#include <unistd.h>
int main() {
int s;
struct sockaddr_can addr;
struct ifreq ifr;
struct can_frame frame;
// 创建CAN socket
if ((s = socket(PF_CAN, SOCK_RAW, CAN_RAW)) < 0) {
perror("Socket creation failed");
return 1;
}
// 设置接口为can0
strcpy(ifr.ifr_name, "can0");
ioctl(s, SIOCGIFINDEX, &ifr);
addr.can_family = AF_CAN;
addr.can_ifindex = ifr.ifr_ifindex;
// 绑定socket
if (bind(s, (struct sockaddr *)&addr, sizeof(addr)) < 0) {
perror("Bind failed");
close(s);
return 1;
}
// 构造一个CAN帧,ID为0x123,数据为充电电流请求
frame.can_id = 0x123;
frame.can_dlc = 2;
frame.data[0] = 0xA1; // 请求类型:充电电流
frame.data[1] = 0x32; // 请求值:50A
// 发送CAN帧
if (write(s, &frame, sizeof(struct can_frame)) != sizeof(struct can_frame)) {
perror("Write failed");
}
close(s);
return 0;
}
代码逻辑分析:
- 创建CAN Socket :使用
socket()函数创建一个CAN通信的原始套接字。 - 设置接口名 :通过
ioctl()获取接口索引,绑定到can0接口。 - 构造CAN帧 :
-can_id:标识该帧的目的地或功能,此处为0x123,表示充电参数请求。
-can_dlc:数据长度码,表示数据字段的字节数,此处为2。
-data[0]:表示请求类型,0xA1表示请求充电电流。
-data[1]:表示请求的电流值,0x32表示50A。 - 发送数据 :通过
write()函数将CAN帧发送到总线上。 - 关闭Socket :通信完成后关闭套接字资源。
该示例展示了如何通过CAN协议在电动汽车与充电桩之间交换充电参数请求,是SAE J2847_2标准中物理层通信的一个典型实现。
3.2 以太网通信技术
随着电动汽车充电功率的不断提升,传统CAN总线在带宽和速率上的限制逐渐显现。以太网通信技术凭借其高速、低延迟和良好的可扩展性,成为新一代充电通信协议中的重要物理层技术。
3.2.1 以太网在高速充电场景中的优势
在高功率直流快充(如120kW、150kW甚至350kW)场景中,通信协议需要更高的带宽和更低的延迟。以太网技术具备以下优势:
| 优势 | 描述 |
|---|---|
| 高带宽 | 支持100Mbps、1Gbps甚至10Gbps通信速率 |
| 低延迟 | 支持时间敏感网络(TSN),实现微秒级同步 |
| 灵活性 | 支持多种网络拓扑结构(如星型、树型) |
| 可扩展性 | 易于与现有IT基础设施集成,支持IP通信 |
| 安全性 | 支持加密通信、认证机制(如TLS/SSL) |
以太网在电动汽车充电中的典型应用包括:
- 充电桩与车辆之间的参数协商
- 充电过程中的实时状态监控
- 远程控制与故障诊断
- 车联网(V2X)通信集成
3.2.2 以太网通信配置与实现
在SAE J2847_2标准中,以太网通信的实现通常基于TCP/IP协议栈,结合特定的通信协议(如Open Charge Point Protocol, OCPP)实现高效的数据交换。
以下是一个基于Python的以太网通信示例,模拟充电桩与车辆之间的TCP通信:
import socket
# 服务端(充电桩)
def start_server():
host = '0.0.0.0'
port = 12345
server_socket = socket.socket(socket.AF_INET, socket.SOCK_STREAM)
server_socket.bind((host, port))
server_socket.listen(1)
print("Charging station listening on port 12345...")
conn, addr = server_socket.accept()
print(f"Connected by {addr}")
while True:
data = conn.recv(1024)
if not data:
break
print("Received:", data.decode())
# 响应车辆充电请求
response = "ACK: Charging parameters accepted"
conn.sendall(response.encode())
conn.close()
# 客户端(车辆)
def send_request():
host = '127.0.0.1'
port = 12345
client_socket = socket.socket(socket.AF_INET, socket.SOCK_STREAM)
client_socket.connect((host, port))
# 发送充电参数请求
request = '{"current": 120, "voltage": 400, "mode": "DC"}'
client_socket.sendall(request.encode())
# 接收响应
response = client_socket.recv(1024)
print("Response from station:", response.decode())
client_socket.close()
# 启动服务端和客户端(需分别运行)
if __name__ == "__main__":
import threading
server_thread = threading.Thread(target=start_server)
server_thread.start()
# 模拟车辆发送请求
import time
time.sleep(1)
send_request()
代码逻辑分析:
-
服务端(充电桩) :
- 使用socket.socket()创建TCP服务端套接字。
- 绑定到本地端口12345并开始监听。
- 接收来自车辆的连接请求并读取数据。
- 解析充电参数请求,并返回确认信息。 -
客户端(车辆) :
- 创建TCP客户端套接字并连接到充电桩IP和端口。
- 发送包含充电电流、电压和模式的JSON格式请求。
- 接收充电桩的响应并打印。 -
通信流程 :
- 车辆通过TCP协议发送充电参数请求。
- 充电桩接收请求并进行处理。
- 充电桩返回确认信息,完成通信。
该示例模拟了以太网通信在电动汽车充电过程中的参数交换流程,展示了其在高速充电场景中的适用性。
3.3 通信物理层的可靠性设计
在实际应用中,物理层通信面临着电磁干扰、信号衰减、线路噪声等挑战。为了确保通信的稳定性和数据的完整性,必须进行严格的可靠性设计。
3.3.1 信号完整性保障
信号完整性(Signal Integrity)是指在高速通信中,信号在传输过程中保持其原始形态的能力。影响信号完整性的因素包括:
- 传输线效应 :长距离传输中的阻抗不匹配导致信号反射。
- 串扰(Crosstalk) :相邻信号线之间的电磁干扰。
- 电源噪声 :电源波动影响信号的电压电平。
- 时钟抖动 :时钟信号不稳定导致采样误差。
为了提升信号完整性,可以采取以下措施:
- 终端匹配 :在传输线两端添加匹配电阻,减少信号反射。
- 差分信号传输 :使用差分对线(如CAN_H和CAN_L)提升抗干扰能力。
- 屏蔽与接地 :使用屏蔽电缆并确保良好接地,减少电磁干扰。
- 布线优化 :缩短走线长度,避免直角拐弯,减少寄生电感。
3.3.2 电磁干扰与防护措施
电磁干扰(EMI)是影响通信质量的常见问题。在电动汽车充电系统中,EMI主要来源于:
- 电机驱动器、逆变器等高功率器件
- 高速开关电路
- 无线通信模块(如蓝牙、Wi-Fi)
为防止EMI对通信造成影响,常见的防护措施包括:
| 防护措施 | 实现方式 |
|---|---|
| 屏蔽电缆 | 使用双绞屏蔽电缆,外层金属网接地 |
| 滤波电路 | 在通信接口添加共模扼流圈和电容滤波 |
| 隔离设计 | 使用光耦或磁隔离器实现电气隔离 |
| PCB布局 | 分离模拟与数字电路,避免平行走线 |
此外,还可以通过以下方式增强通信系统的抗干扰能力:
- CRC校验 :在数据链路层添加循环冗余校验,提升数据传输的准确性。
- 重传机制 :在检测到数据错误时,自动请求重传。
- 自适应速率调整 :根据通信质量动态调整波特率或通信速率。
通过本章的详细分析,我们深入探讨了CAN总线和以太网在电动汽车充电通信中的应用,包括其通信架构、数据帧结构、编程实现以及可靠性设计策略。这些内容为后续章节中数据链路层和应用层的讨论打下了坚实的基础。
4. 数据链路层错误检测与纠正机制
在电动汽车与外部充电设备的通信系统中,数据链路层作为连接物理层与上层协议的关键桥梁,其核心职责不仅在于确保数据的可靠传输,还包括对通信过程中可能出现的错误进行检测与纠正。SAE J2847_2标准对数据链路层的规范,尤其在高噪声、高电磁干扰的车载环境中显得尤为重要。本章将深入剖析数据链路层的功能、错误检测技术(如CRC校验)以及错误纠正与重传机制,帮助读者理解如何在实际通信中实现高可靠性和低误码率的数据传输。
4.1 数据链路层的功能与作用
4.1.1 数据帧结构设计
数据链路层的核心任务之一是将物理层传输的原始比特流组织成结构化的数据帧(Frame),以便进行差错控制和流量控制。SAE J2847_2标准中定义了符合电动汽车通信需求的数据帧结构,主要包括以下几个部分:
| 字段 | 描述 | 示例值 |
|---|---|---|
| 帧头(Start of Frame) | 标识一帧数据的开始 | 0x55 |
| 地址字段(Address Field) | 指定目标设备地址 | 0x12 |
| 控制字段(Control Field) | 指示帧类型(如数据帧、确认帧等) | 0x03 |
| 数据字段(Data Field) | 实际传输的数据内容 | 0xA1, 0xB2, 0xC3 |
| 校验字段(CRC) | 用于错误检测的校验码 | 0x34A2 |
| 帧尾(End of Frame) | 标识一帧数据的结束 | 0xAA |
上述帧结构的设计使得接收方能够准确地识别数据边界、目标设备、数据类型,并进行完整性校验。这种结构化设计有助于提高通信效率,减少误码率。
4.1.2 帧同步与差错控制
帧同步(Frame Synchronization)是指接收端能够正确识别数据帧的起始和结束位置,从而避免因数据位错位而引起的解析错误。SAE J2847_2中采用特定的帧头和帧尾标识符来实现帧同步,确保数据在传输过程中不会丢失边界信息。
差错控制(Error Control)则主要依赖于校验字段(如CRC)来实现。数据链路层在发送端对数据进行校验码计算并附加到帧中,接收端在接收到数据后重新计算校验码并与接收到的值进行比对。若不一致,则认为数据在传输过程中发生了错误。
// CRC-16/CCITT-FALSE 校验算法示例
unsigned short crc16_ccitt_false(unsigned char *data, int len) {
unsigned short crc = 0xFFFF;
int i;
while(len--) {
crc ^= (unsigned short)*data++ << 8;
for(i = 0; i < 8; i++) {
if(crc & 0x8000)
crc = (crc << 1) ^ 0x1021;
else
crc <<= 1;
}
}
return crc;
}
代码逻辑分析:
- 函数功能: 计算输入数据的16位CRC校验值(使用CCITT-FALSE多项式)。
- 参数说明:
data:指向待校验数据的指针。len:数据长度(字节数)。- 逐行解读:
1. 初始化CRC寄存器为0xFFFF。
2. 遍历每个字节,将其左移8位后与CRC寄存器异或。
3. 对每一位进行判断,若最高位为1,则与多项式0x1021异或;否则左移一位。
4. 返回最终的CRC值。
该算法在电动汽车通信中被广泛使用,以确保数据完整性。
4.2 错误检测技术
4.2.1 CRC校验原理与实现
CRC(Cyclic Redundancy Check)是一种广泛应用于数据通信中的错误检测技术。其原理基于多项式除法:将数据视为一个二进制多项式,除以一个固定多项式后得到的余数即为校验码。接收端通过相同的运算来验证余数是否一致,从而判断数据是否出错。
SAE J2847_2标准中通常采用CRC-16或CRC-32算法,具体取决于通信速率和数据量需求。例如:
graph TD
A[原始数据] --> B[生成多项式]
B --> C[计算余数]
C --> D[附加到数据帧末尾]
D --> E[发送至接收端]
E --> F[接收端重新计算CRC]
F --> G{是否一致?}
G -->|是| H[接受数据]
G -->|否| I[请求重传]
流程图说明:
- 节点A :原始数据被封装为帧。
- 节点B-C :发送端使用CRC算法计算校验码。
- 节点D-E :带有CRC的数据帧被发送。
- 节点F-G :接收端重新计算CRC并与收到的值比较。
- 节点H-I :根据结果决定是否接受数据或请求重传。
CRC机制极大地提高了通信的可靠性,特别是在高噪声环境下。
4.2.2 常见错误类型与检测方法
在数据通信中,常见的错误类型包括:
| 错误类型 | 描述 | 检测方法 |
|---|---|---|
| 单比特错误 | 一个比特位被翻转 | 奇偶校验、CRC |
| 多比特错误 | 多个比特位同时出错 | CRC、Hamming码 |
| 突发错误 | 连续多个比特出错(如电磁干扰) | CRC、BCH码 |
| 数据丢失 | 整个数据帧未接收到 | 超时重传机制 |
| 数据重复 | 接收到重复的数据帧 | 序号机制 |
SAE J2847_2中推荐使用CRC校验结合超时重传机制来应对上述各种错误。例如,在数据链路层中设置一个超时计时器,若在规定时间内未收到确认帧,则自动触发重传机制。
4.3 错误纠正与重传机制
4.3.1 数据重传策略
数据重传是数据链路层提高通信可靠性的关键手段。在SAE J2847_2中,重传策略主要包括以下几种:
-
停止等待协议(Stop-and-Wait ARQ):
- 发送方发送一帧后等待接收方的确认。
- 若超时未收到确认,则重传该帧。
- 优点:实现简单。
- 缺点:效率低,带宽利用率不高。 -
连续ARQ协议(Go-Back-N):
- 发送方可以连续发送多个数据帧,无需等待每个帧的确认。
- 接收方仅确认最后一个正确接收的帧,若中间帧出错,则发送方需重传从出错帧开始的所有后续帧。
- 优点:提高效率。
- 缺点:网络拥塞时可能造成大量重传。 -
选择重传协议(Selective Repeat):
- 接收方仅请求重传出错的帧,其余正确帧继续接收。
- 优点:高效利用带宽。
- 缺点:实现复杂度高。
以下是Go-Back-N协议的伪代码实现:
def go_back_n_sender(frames, window_size):
base = 0
next_frame_to_send = 0
while next_frame_to_send < len(frames):
# 发送窗口内的所有帧
while next_frame_to_send < base + window_size and next_frame_to_send < len(frames):
send_frame(frames[next_frame_to_send])
next_frame_to_send += 1
# 等待ACK
ack = wait_for_ack()
if ack >= base:
base = ack + 1
逻辑分析:
- 函数功能: 实现Go-Back-N协议的发送端逻辑。
- 参数说明:
frames:待发送的数据帧列表。window_size:发送窗口大小。- 逐行解读:
1. 初始化发送窗口的起始位置base为0。
2. 在窗口范围内发送数据帧。
3. 等待接收方的确认帧(ACK)。
4. 若收到确认帧,则更新窗口起始位置。
5. 若未收到确认帧(超时),则重传窗口内所有未确认的帧。
这种策略在电动汽车通信中可以有效提升数据传输效率。
4.3.2 纠错编码技术的应用
除了重传机制外,SAE J2847_2还支持使用前向纠错码(Forward Error Correction, FEC)来减少重传次数。常见的FEC技术包括:
- Hamming码: 可以检测并纠正单比特错误。
- BCH码: 适用于突发错误的检测与纠正。
- Reed-Solomon码: 广泛应用于高速通信中,具有较强的纠错能力。
以Hamming码为例,其基本思想是通过添加冗余位来实现错误定位与纠正。假设原始数据为 d1d2d3d4 ,Hamming码会添加3个冗余位 p1p2p3 ,形成7位码字:
p1 p2 d1 p3 d2 d3 d4
其中:
p1 = d1 ^ d2 ^ d4p2 = d1 ^ d3 ^ d4p3 = d2 ^ d3 ^ d4
接收端通过计算冗余位的异或值来判断是否出错及出错位置,从而进行纠正。
// Hamming码解码示例
int hamming_decode(unsigned char code) {
int p1 = (code & 0x01);
int p2 = (code & 0x02) >> 1;
int p3 = (code & 0x04) >> 2;
int d1 = (code & 0x08) >> 3;
int d2 = (code & 0x10) >> 4;
int d3 = (code & 0x20) >> 5;
int d4 = (code & 0x40) >> 6;
int error_pos = 0;
if ((d1 ^ d2 ^ d4) != p1) error_pos += 1;
if ((d1 ^ d3 ^ d4) != p2) error_pos += 2;
if ((d2 ^ d3 ^ d4) != p3) error_pos += 4;
if (error_pos > 0) {
// 翻转错误位
code ^= (1 << (error_pos - 1));
}
return code;
}
代码逻辑分析:
- 函数功能: 实现Hamming码的解码与错误纠正。
- 参数说明:
code:接收到的7位Hamming码。- 逐行解读:
1. 提取每一位的值。
2. 分别计算各冗余位是否与数据位异或一致。
3. 若不一致,则记录错误位置。
4. 若存在错误,则翻转对应位以纠正错误。
该方法在电动汽车通信中可用于增强数据的抗干扰能力,减少因错误导致的重传次数。
本章系统地介绍了SAE J2847_2标准中数据链路层的错误检测与纠正机制,包括数据帧结构、CRC校验、错误类型识别、重传策略以及纠错编码的应用。通过这些机制的协同工作,电动汽车与充电桩之间的通信能够在复杂电磁环境中保持高度的可靠性和稳定性。
5. 应用层数据交换规范(充电请求、状态报告、参数协商)
应用层作为通信协议栈的最上层,负责实现电动汽车与充电桩之间的高层交互,包括充电请求的发起、状态信息的实时上报以及充电参数的协商与管理。该层直接面向用户和系统功能需求,其数据交换规范的标准化是保障充电过程安全、高效的关键。
5.1 充电请求与响应机制
在充电开始前,车辆控制系统(Vehicle Control Unit, VCU)会通过应用层协议向充电桩发送充电请求。该请求通常包含车辆身份信息、当前电池状态、期望的充电模式等关键数据。
5.1.1 请求数据包的结构
一个典型的充电请求数据包结构如下所示(以CAN通信为例):
| 字段名称 | 长度(字节) | 描述 |
|---|---|---|
| Message ID | 4 | 消息唯一标识符 |
| VIN | 17 | 车辆识别码 |
| Battery SOC | 1 | 当前电池荷电状态百分比 |
| Charging Mode | 1 | 期望充电模式(如CC/CV) |
| Max Voltage | 2 | 最大允许电压(单位:0.1V) |
| Max Current | 2 | 最大允许电流(单位:0.1A) |
| CRC | 4 | 数据完整性校验码 |
示例代码片段(使用伪代码模拟请求数据包构造):
typedef struct {
uint32_t message_id;
char vin[17];
uint8_t battery_soc;
uint8_t charging_mode; // 0: CC, 1: CV
uint16_t max_voltage; // 以0.1V为单位
uint16_t max_current; // 以0.1A为单位
uint32_t crc;
} ChargingRequest;
ChargingRequest req = {
.message_id = 0x12345678,
.vin = "VIN12345678901234",
.battery_soc = 50,
.charging_mode = 0,
.max_voltage = 4000, // 400.0V
.max_current = 2000 // 200.0A
};
calculate_crc(&req); // 计算CRC校验值
5.1.2 响应机制与状态反馈
充电桩接收到请求后,会根据自身的硬件能力、电网状态及安全策略进行判断,并返回响应消息。响应内容通常包括是否接受请求、允许的充电电压/电流范围等。
响应数据包结构示例:
| 字段名称 | 长度(字节) | 描述 |
|---|---|---|
| Message ID | 4 | 消息唯一标识符 |
| Response Code | 1 | 响应结果(0=成功,非0=失败) |
| Allowed Voltage | 2 | 允许的最大电压(0.1V单位) |
| Allowed Current | 2 | 允许的最大电流(0.1A单位) |
| CRC | 4 | 数据完整性校验码 |
5.2 充电过程中的状态报告
在充电过程中,车辆与充电桩之间需定期交换状态信息,确保充电过程的实时监控与安全控制。
5.2.1 实时状态信息的传输
状态信息通常包括电池电压、电流、温度、充电时间累计、充电进度等。这些信息通过应用层周期性地发送,用于监控和日志记录。
示例状态信息数据包结构如下:
| 字段名称 | 长度(字节) | 描述 |
|---|---|---|
| Timestamp | 4 | 时间戳(秒) |
| Battery Voltage | 2 | 实时电压(0.1V单位) |
| Battery Current | 2 | 实时电流(0.1A单位) |
| Battery Temp | 1 | 电池温度(℃) |
| Charge Progress | 1 | 已完成百分比 |
| Status Flags | 1 | 状态标志位(如过热、故障等) |
| CRC | 4 | 数据完整性校验码 |
5.2.2 状态信息的解析与处理
充电桩接收到状态信息后,通常会通过内部逻辑判断是否需要调整输出参数或发出警告。例如,当检测到电池温度过高时,可能降低输出电流或暂停充电。
示例处理逻辑伪代码如下:
def handle_status_packet(packet):
voltage = packet['Battery Voltage'] * 0.1
current = packet['Battery Current'] * 0.1
temp = packet['Battery Temp']
progress = packet['Charge Progress']
if temp > 50:
print("Warning: Battery temperature too high. Reducing current.")
adjust_output(current * 0.7)
elif progress >= 100:
print("Charging complete. Stopping output.")
stop_charging()
else:
print(f"Charging at {voltage}V, {current}A, {progress}% complete.")
5.3 参数协商与配置管理
在充电过程中,车辆与充电桩可能需要根据实时状态动态调整充电参数,如电压、电流或充电模式。
5.3.1 充电参数的协商流程
参数协商通常发生在充电初始化阶段或充电过程中。协商流程如下图所示(使用Mermaid格式描述):
sequenceDiagram
participant VCU
participant Charger
VCU->>Charger: 发送充电请求(5.1.1)
Charger->>VCU: 返回初始允许参数(5.1.2)
VCU->>Charger: 请求参数调整(如增加电流)
Charger->>VCU: 回应是否接受调整
alt 接受调整
VCU->>Charger: 确认并执行新参数
else 拒绝调整
VCU->>Charger: 保持原参数或尝试其他值
end
5.3.2 参数变更与动态调整机制
参数变更机制需确保通信双方对变更达成一致,并在变更后保持通信同步。通常采用“请求-确认”机制,确保数据一致性。
例如,车辆请求将充电电流从100A提升至150A,充电桩在确认其供电能力后,返回确认信息并执行调整。
代码示例(模拟参数变更请求):
typedef struct {
uint32_t message_id;
uint16_t new_current; // 新电流值(0.1A单位)
uint16_t new_voltage; // 新电压值(0.1V单位)
uint32_t crc;
} ParamChangeRequest;
ParamChangeRequest change_req = {
.message_id = 0x87654321,
.new_current = 1500, // 150.0A
.new_voltage = 4000 // 400.0V
};
calculate_crc(&change_req);
充电桩在接收到该请求后,执行逻辑如下:
def handle_param_change(request):
if can_support(request.new_voltage, request.new_current):
apply_new_parameters(request.new_voltage, request.new_current)
return {"status": "accepted", "ack_id": request.message_id}
else:
return {"status": "rejected", "reason": "Over capacity"}
通过上述机制,应用层实现了电动汽车与充电桩之间高效、安全的数据交换,为智能充电管理提供了坚实基础。
简介:SAE J2847_2:2015是由美国汽车工程师学会制定的标准,定义了插电式电动汽车与直流充电桩之间的通信协议,涵盖物理层、数据链路层和应用层,确保充电过程的安全性与互操作性。该标准详细描述了充电初始化、监控、中断处理及结束阶段的流程,并致力于推动不同厂商设备之间的兼容。适用于电动汽车通信系统开发与测试,是理解和实现EV充电通信的重要技术文档。

开源鸿蒙跨平台开发社区汇聚开发者与厂商,共建“一次开发,多端部署”的开源生态,致力于降低跨端开发门槛,推动万物智联创新。
更多推荐
 4
4 0
0- 0



 已为社区贡献6条内容
已为社区贡献6条内容

所有评论(0)