LSTM+GNN这么做,2区以上没问题!
是一个非常有前景,且能发高区的思路!近来其更是取得了新突破,模型DNN-GNN-LSTM在自动驾驶轨迹预测中,误差狂降95%,且参数量减少97.7%;模型hetGNN-LSTM则推理速度飙升了10倍……此外,在ACM MM24、AAAI24等顶会也不乏其身影。其热度可见一斑!主要在于,该结合能同时捕捉数据中的时间相关性和空间相关性,不仅能提升模型性能,也能适应诸多实际场景需要,像是交通预测、社交网
LSTM+GNN是一个非常有前景,且能发高区的思路!
近来其更是取得了新突破,模型DNN-GNN-LSTM在自动驾驶轨迹预测中,误差狂降95%,且参数量减少97.7%;模型hetGNN-LSTM则推理速度飙升了10倍……此外,在ACM MM24、AAAI24等顶会也不乏其身影。
其热度可见一斑!主要在于,该结合能同时捕捉数据中的时间相关性和空间相关性,不仅能提升模型性能,也能适应诸多实际场景需要,像是交通预测、社交网络分析、股价预测等。具体点说,LSTM擅长捕捉长期依赖关系,GNN长于图结构数据处理,尤其是捕捉节点之间的复杂关系和空间特征。两者结合,便能实现1+1>2的效果!
为让大家能够紧跟领域前沿,早点发出自己的顶会,我给大家准备了10种创新思路,原文和源码都有!
论文原文+开源代码需要的同学看文末
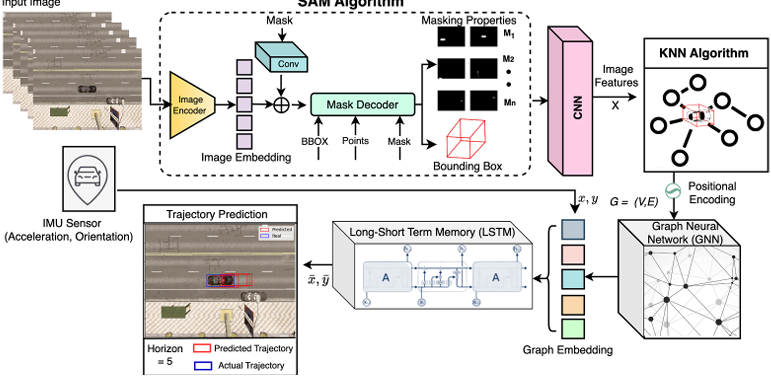
Optimizing Ego Vehicle Trajectory Prediction: The Graph En hancement Approach
内容:本文提出了一种基于鸟瞰图(BEV)和图神经网络(GNN)的自动驾驶车辆轨迹预测方法。该方法通过语义分割模型提取BEV图像中的目标边界框和分割掩码,利用深度神经网络(DNN)提取特征,并通过K最近邻算法构建图结构,以捕捉场景中目标之间的空间关系。接着,使用GNN处理空间特征,并结合长短期记忆网络(LSTM)学习时间动态,从而实现对自动驾驶车辆轨迹的准确预测。实验结果表明,该方法在预测精度和模型参数数量上均优于传统的基于DNN-LSTM的方法。
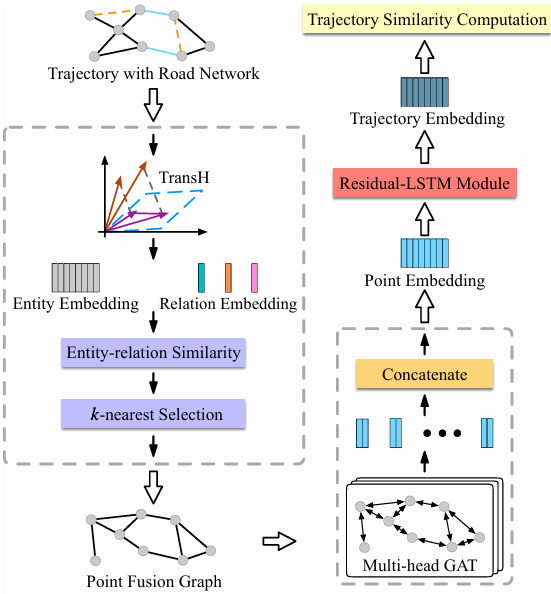
GRLSTM: Trajectory Similarity Computation with Graph-Based Residual LSTM
内容:本文提出了一种名为GRLSTM的新型框架,用于计算轨迹相似性。该框架针对现有方法在欧几里得空间中设计的局限性,结合了知识图谱嵌入(KGE)、图神经网络(GNN)和残差网络,将其融入多层LSTM中,以同时捕捉轨迹和道路网络的特性。通过构建点知识图谱、学习点嵌入和关系嵌入,并利用GNN捕获拓扑结构信息,最后通过残差LSTM学习轨迹嵌入。
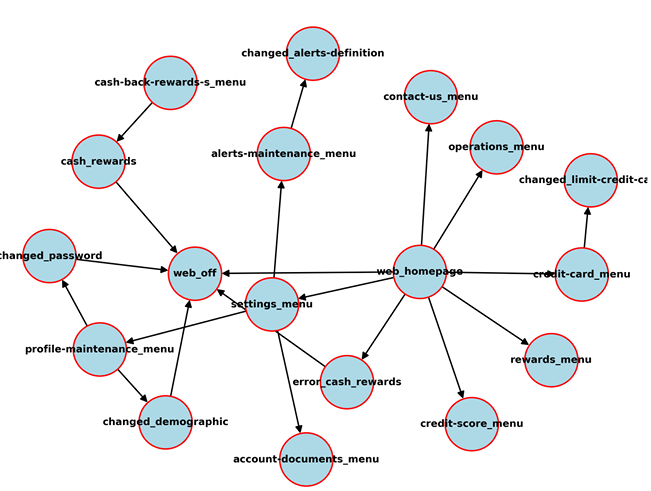
Predicting Customer Goals in Financial Institution Services: AData-Driven LSTM Approach
内容:本文提出了一种基于数据驱动的LSTM方法,用于预测金融机构中客户的目标和未来行为。研究使用了由模拟器生成的历史客户行为数据,并构建了两种模型:一种是基于LSTM的模型,另一种是结合状态空间图嵌入的增强型LSTM模型。实验结果表明,这两种模型在预测客户目标和行为方面表现出色,尤其是图嵌入的LSTM模型在准确性上显著优于传统方法。
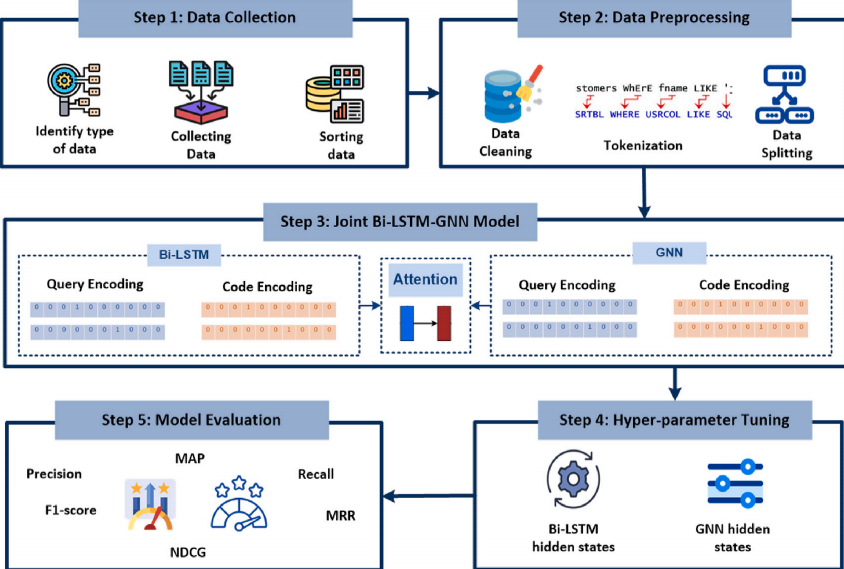
Enhancing source code retrieval with joint Bi-LSTM-GNN architecture: A comparative study with ChatGPT-LLM
内容:本文提出了一种基于联合双向长短期记忆网络(Bi-LSTM)和图神经网络(GNN)架构的源代码检索方法,并与ChatGPT语言模型进行了比较研究。研究指出,传统的代码检索方法在处理查询文本和代码片段的深度结构特征时存在不足,而联合Bi-LSTM-GNN架构能够更好地捕捉代码的语义信息,通过图结构化数据表示和图匹配搜索模型,显著提升了代码检索的性能。
码字不易,欢迎大家点赞评论收藏!
关注下方《AI科研技术派》
回复【LSGN】获取完整论文
👇

开源鸿蒙跨平台开发社区汇聚开发者与厂商,共建“一次开发,多端部署”的开源生态,致力于降低跨端开发门槛,推动万物智联创新。
更多推荐
 18
18 0
0- 0



 已为社区贡献3条内容
已为社区贡献3条内容

所有评论(0)