最近在项目里用S7-1214C玩转多设备协同,顺手把实战代码整理成了可复用的模板。这个方案里PLC既要驱动运动部件又要处理多种通讯协议,咱们直接上干货
特别注意MS300的保持寄存器是16位对齐的,写多字参数时要处理高低字节顺序。有个坑是站号设置必须和变频器参数P0-15完全对应,差一位都连不上。用PTO功能输出四轴脉冲其实挺简单,关键是要做好轴配置。还有个经验:TCP连接建立后要定期发心跳包,防止防火墙误杀连接。同时带四个MS300变频器要用轮询机制,实测每个从站响应超时设300ms刚好。西门子1214C与上位机进行TCP/IP开放通讯控制相机
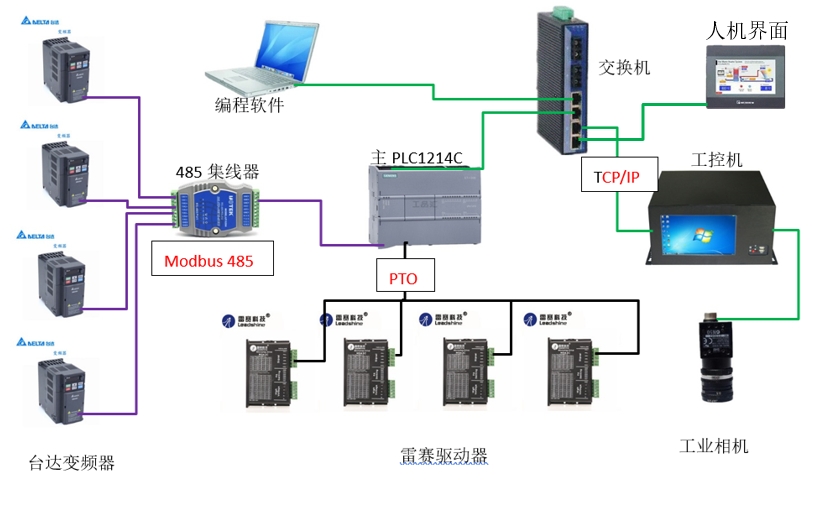
西门子1200程序V15版本实例,设备已经运行生产,博图V15以上可打开 包含上位机通讯,modbus485,伺服等,特分享给大家。 西门子1214C控制4台步进电机; 西门子1214C与4台MS300变频器modbus485轮询读写参数; 西门子1214C与上位机进行TCP/IP开放通讯控制相机拍照,反馈数据
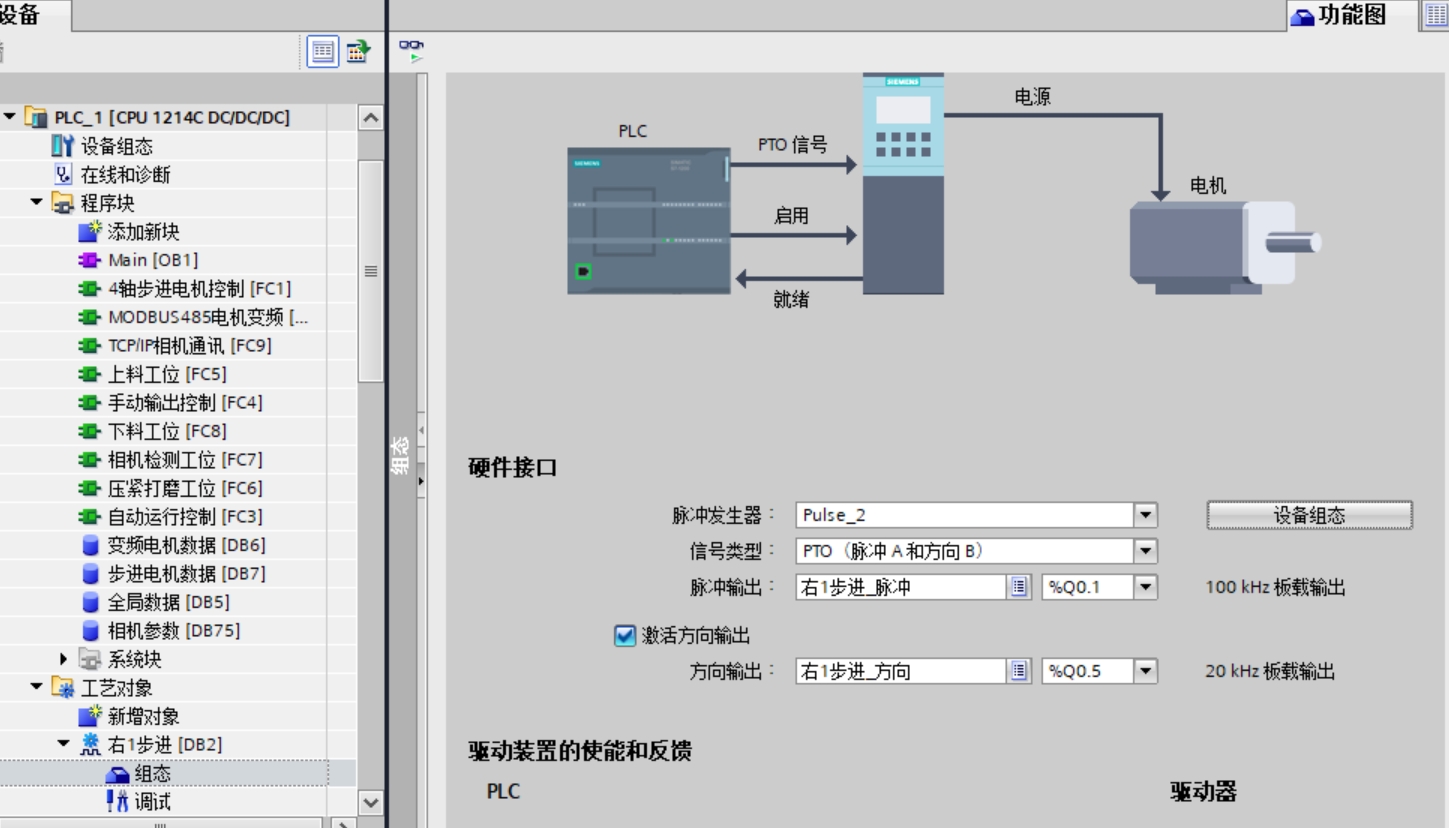
四路步进电机脉冲控制
用PTO功能输出四轴脉冲其实挺简单,关键是要做好轴配置。在工艺对象里给每个轴分配对应的输出点,注意不同轴脉冲+方向信号必须接在不同Q点上:
//轴配置参数示例
Axis_Config[0].HWID := 1; //轴1硬件标识
Axis_Config[0].OutputNumber := 0; //Q0.0脉冲输出
Axis_Config[0].DirOutput := 1; //Q0.1方向信号
//...其他三轴类似配置触发运动用MC_MoveRelative指令时,遇到过脉冲丢失问题。后来发现是轴使能信号没做互锁,加个急停连锁就稳了:
IF NOT Emergency_Stop THEN
Axis_Enable := TRUE;
ELSE
Axis_Enable := FALSE;
END_IFModbus轮询的骚操作
同时带四个MS300变频器要用轮询机制,实测每个从站响应超时设300ms刚好。关键点是把读写操作做成状态机切换:
CASE comm_state OF
0: //站1读频率
MB_MASTER(REQ:=TRUE, MB_ADDR:=1,
MODE:=0, DATA_ADDR:=40001,
DATA_LEN:=1, DATA_PTR:=@DB1.DBW0);
comm_state := 10;
10: //站1写参数
IF MB_MASTER.DONE THEN
MB_MASTER(REQ:=TRUE, MB_ADDR:=1,
MODE:=1, DATA_ADDR:=40010,
DATA_LEN:=2, DATA_PTR:=@DB1.DBW2);
comm_state := 20;
END_IF;
//...其他站轮询逻辑类似特别注意MS300的保持寄存器是16位对齐的,写多字参数时要处理高低字节顺序。有个坑是站号设置必须和变频器参数P0-15完全对应,差一位都连不上。
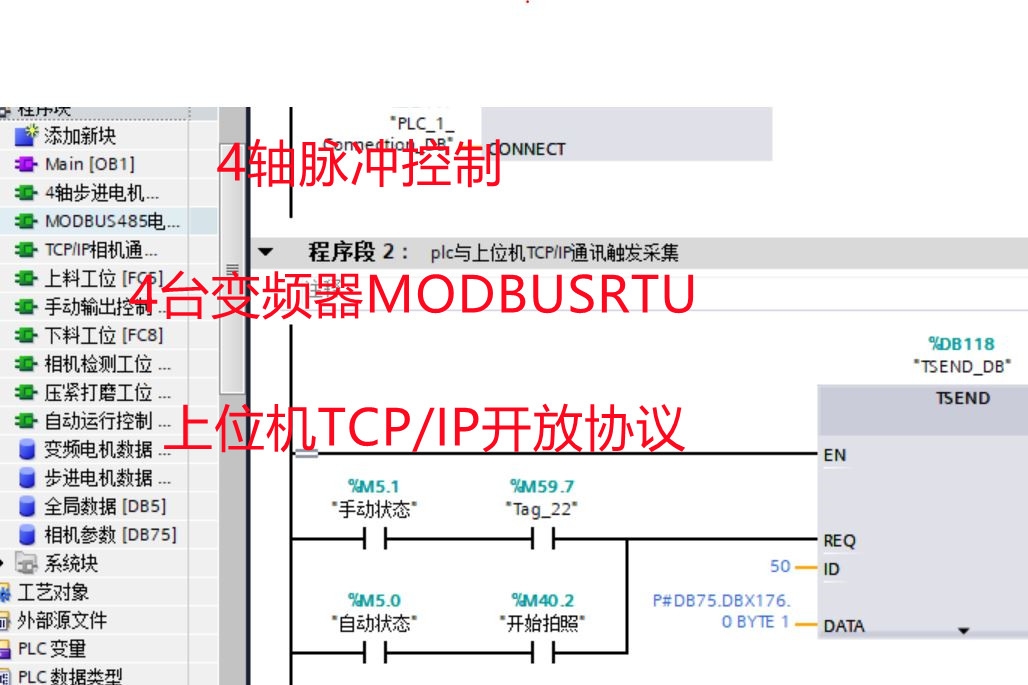
TCP通讯玩转视觉系统
开放通讯用TSEND/TRCV指令块处理相机控制。上位机发拍照指令的典型数据帧结构:
# 上位机发送指令示例
b'CAM1_TRIG' # 触发1号相机
b'CAM2_GET' # 获取2号结果PLC端收到指令后拼装反馈数据,注意字符串处理要用S7STRING格式:
//接收数据处理
IF TRCV_DONE THEN
CASE RECV_DATA[0] OF
"T": //触发拍照
Camera_Trig := TRUE;
"G": //获取结果
T_SEND(REQ:=TRUE, DATA:= P#DB2.START_IMAGE_DATA);
END_CASE;
END_IF;调试时发现网线直连比经过交换机延迟低30ms,实时控制建议用专用网段。还有个经验:TCP连接建立后要定期发心跳包,防止防火墙误杀连接。
这套模板在包装产线跑了三个月没出过通讯故障,需要完整项目的直接去GitHub搜S7-1200MultiDeviceTemplate。有更好的轮询算法欢迎来战,下期聊聊怎么用这个架构做配方管理系统。

开源鸿蒙跨平台开发社区汇聚开发者与厂商,共建“一次开发,多端部署”的开源生态,致力于降低跨端开发门槛,推动万物智联创新。
更多推荐
 4
4 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)