基于OpenHarmony的智慧农业控制系统-硬件部分【1】
本文介绍了智能温室控制系统的硬件配置与接线方案。系统采用小熊派开发板作为主控单元,集成SHT30温湿度传感器、BH1750光照传感器和JW01-CO2二氧化碳传感器构成环境感知层。执行层包含LED补光灯、微型水泵、电磁水阀、直流风扇和SG90舵机等设备,通过PWM和继电器控制。硬件接线详细说明了各传感器的I2C接口连接方式(SHT30与BH1750共用总线)和执行器的控制逻辑(低电平触发),特别强
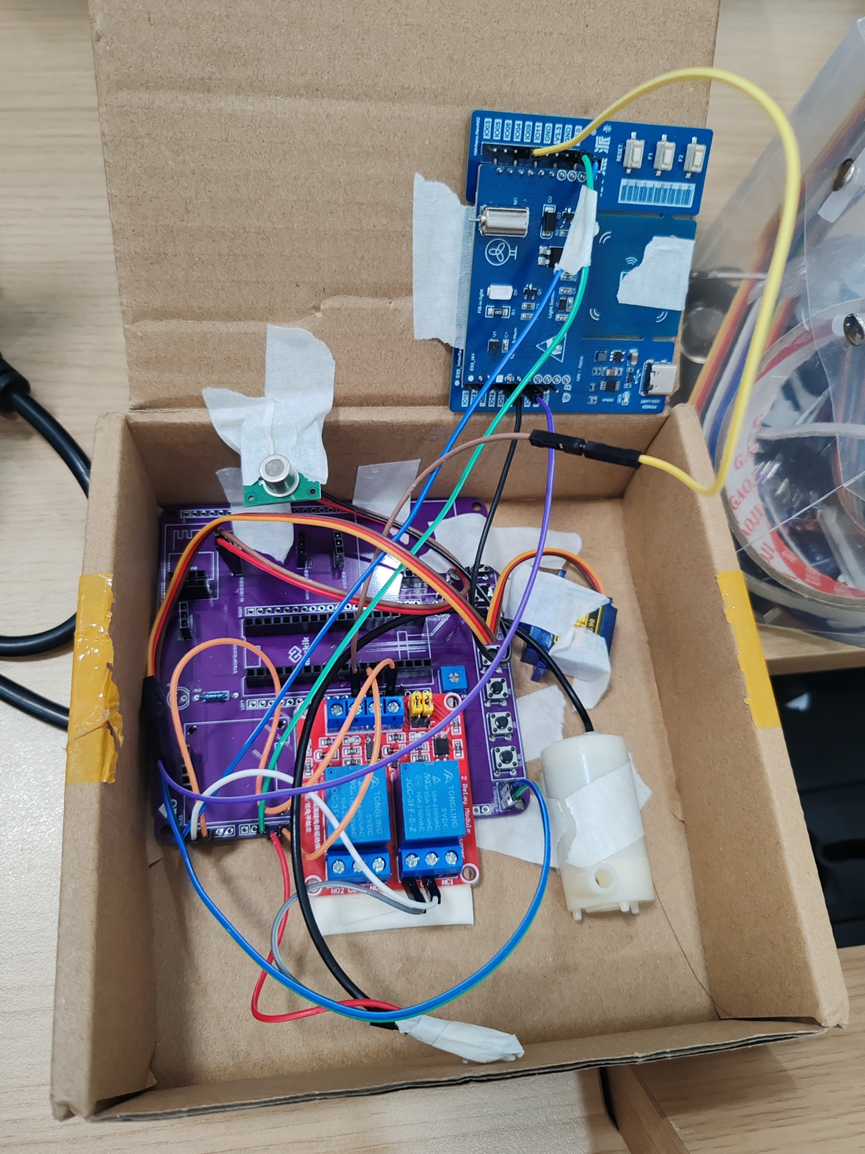
1.整体设备
2.硬件清单:
一、主控单元(边缘网关)
| 硬件名称 | 型号/规格 | 数量 | 备注 |
|---|---|---|---|
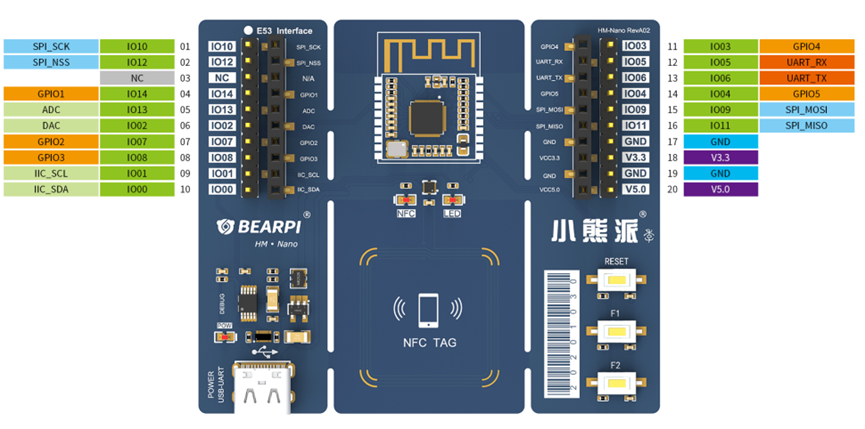
| 小熊派开发板 | BearPi-HM Nano(搭载 Hi3861 芯片,支持 OpenHarmony LiteOS) | 1块 | 核心控制单元,集成 Wi-Fi,负责数据采集、设备控制、MQTT 通信 |
二、传感器模块(环境感知层)
| 硬件名称 | 型号/规格 | 接口 | 数量 | 备注 |
|---|---|---|---|---|
| 温湿度传感器 | SHT30 | I2C | 1个 | 测量空气温度(±0.2℃)和湿度(±2% RH)。本项目同时用于模拟土壤温湿度 |
| 光照强度传感器 | BH1750 | I2C | 1个 | 测量光照强度(0~65535 lux),用于自动补光闭环控制 |
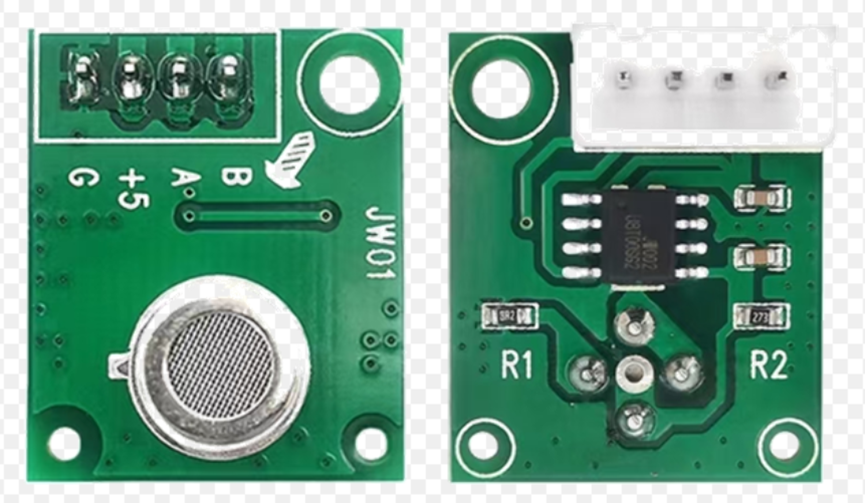
| 二氧化碳浓度传感器 | JW01-CO2-V2.2 | ADC | 1个 | NDIR 原理,测量范围 0~5000 ppm,用于通风联动控制 |
⚠️ 注:系统设计文档中提及的“电容式土壤湿度传感器”和“DS18B20土壤温度传感器”在本项目中未实际部署,土壤温湿度通过 SHT30 数据线性映射模拟实现。

三、执行设备(控制执行层)
| 硬件名称 | 型号/规格 | 控制方式 | 数量 | 备注 |
|---|---|---|---|---|
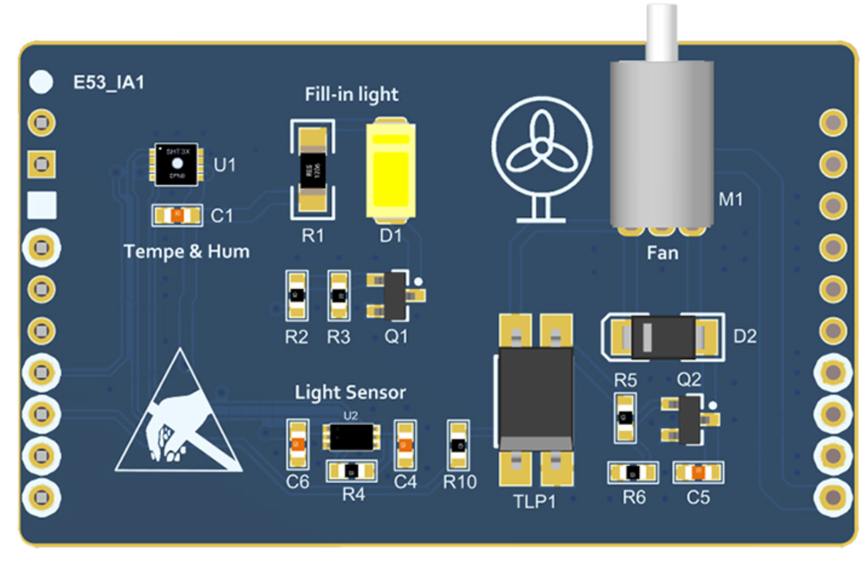
| LED 补光灯 | 3W 白光 LED 灯带/模组 | PWM(GPIO_9) | 1路 | 用于自动补光,亮度 0~100% 可调 |
| 微型水泵 | 5V 直流隔膜水泵 | GPIO_4 + 继电器 | 1个 | 用于环境湿度控制(空气加湿) |
| 常闭式电磁水阀 | 5V 直流,1/4英寸 | GPIO_5 + 继电器 | 1个 | 用于土壤灌溉控制 |
| 直流风扇 | 5V 轴流风扇(40×40×10mm) | GPIO_8 + 继电器 | 1个 | 用于 CO₂ 超标时强制通风 |
| 微型舵机 | SG90(9g) | PWM(GPIO_7) | 1个 | 控制通风口盖板开合角度(0~180°) |
继电器模块:建议选用 5V 低电平触发 光耦隔离继电器,用于水泵、水阀、风扇的强弱电隔离控制。



四、其他配件与工具
| 名称 | 规格说明 | 数量 | 备注 |
|---|---|---|---|
| 电源适配器 | 5V / 3A(USB) + 12V / 2A(可选) | 各1个 | 5V 为主控与部分执行器供电;12V 用于大功率设备(可统一为5V执行器简化供电) |
| 电源线/杜邦线 | 母对母、公对母 | 若干 | 连接传感器、继电器、开发板 |
| USB 数据线 | Micro-USB | 1根 | 烧录程序、供电、串口调试 |
| 亚克力模型 | 约 40×30×30 cm | 1套 | 微缩温室大棚模型,用于演示与测试 |
| 硅胶管 | 内径 3~5 mm | 若干 | 水泵输水、滴灌 |
| 水箱/水瓶 | 小型容器 | 1个 | 水源 |
| 万用表 | 可选(如 UT61E) | 1台 | 调试与测试电压、通断 |
| 照度计 | 可选(如 AR824) | 1台 | 校准 BH1750 光照传感器 |
| 串口调试模块 | CH340 | 1个 | 查看系统日志,调试开发板 |
五、硬件清单汇总(核心系统)
| 类别 | 硬件名称 | 数量 |
|---|---|---|
| 主控 | 小熊派 BearPi-HM Nano | 1 |
| 传感器 | SHT30 | 1 |
| 传感器 | BH1750 | 1 |
| 传感器 | JW01-CO2-V2.2 | 1 |
| 执行器 | LED 补光灯(PWM) | 1 |
| 执行器 | 微型水泵(5V) | 1 |
| 执行器 | 常闭电磁水阀(5V) | 1 |
| 执行器 | 直流风扇(5V) | 1 |
| 执行器 | 舵机 SG90 | 1 |
| 控制 | 5V 继电器模块 | 3 |
| 供电 | 5V/3A 电源适配器 | 1 |
| 结构 | 亚克力微缩温室模型 | 1 |
六、说明
-
土壤数据:本系统未使用真实土壤传感器,土壤温湿度通过 SHT30 空气温湿度线性映射模拟,满足竞赛演示与灌溉算法验证需求。
-
电源:建议统一使用 5V 执行器,可简化供电为单路 5V/3A 适配器。
-
扩展性:I2C 总线、ADC、GPIO、PWM 接口均有剩余,可扩展 pH 传感器、叶面湿度传感器、摄像头等设备。
-
部署环境:需保证 2.4GHz Wi-Fi 覆盖,系统支持断网本地自治运行。
3.硬件接线:
说明:
所有 GPIO 输出默认配置为低电平有效(继电器模块为低电平触发,LED/舵机由 PWM 直接驱动)
继电器模块使用 5V 低电平触发 类型(光耦隔离)
电源建议:5V/3A 统一供电(执行器尽量选用 5V 版本)
一、传感器接线
1. SHT30 温湿度传感器(板载)
-
位置:固定在小熊派开发板背面,无需外部接线
-
内部 I2C 连接对应引脚:
-
SCL → GPIO_2(I2C 时钟)
-
SDA → GPIO_3(I2C 数据)
-
VCC → 3.3V
-
GND → GND
-
2. BH1750 光照传感器(外接)
| BH1750 引脚 | 小熊派引脚 | 说明 |
|---|---|---|
| VCC | 3.3V | 电源正极 |
| GND | GND | 电源负极 |
| SCL | GPIO_2 | I2C 时钟线 |
| SDA | GPIO_3 | I2C 数据线 |
| ADDR | GND | 设置 I2C 地址为 0x23 |
注意:I2C 总线与 SHT30 共用,设备地址不同,可同时工作。
3. JW01-CO2-V2.2 二氧化碳传感器(外接)
| CO2 传感器引脚 | 小熊派引脚 | 说明 |
|---|---|---|
| +5V | 5V | 电源正极(5V) |
| G | GND | 电源负极 |
| A | GPIO_13 | 模拟信号输出(ADC 通道 4) |
| B | 不接 | 串口 TXD(本系统不使用) |
模拟电压 0~3.0V 对应 CO2 浓度 0~5000 ppm。
二、执行器接线
1. LED 补光灯(PWM 调光)
| LED 引脚 | 小熊派引脚 | 说明 |
|---|---|---|
| VCC | 5V | 电源正极 |
| GND | GND | 电源负极 |
| PWM | GPIO_9 | PWM 调光信号(频率 1kHz) |
2. 水泵(继电器控制)
继电器模块接线(低电平触发):
| 继电器引脚 | 小熊派引脚 | 说明 |
|---|---|---|
| VCC | 5V | 继电器模块电源 |
| GND | GND | 模块地线 |
| IN | GPIO_4 | 控制信号(低电平开启) |
水泵负载接线:
| 水泵线 | 继电器端子 | 说明 |
|---|---|---|
| 正极(红) | COM(公共端) | - |
| 负极(黑) | 电源负极(GND) | 直接接电源地 |
| - | NO(常开端) | 接电源正极(5V 或 12V) |
| - | NC(常闭端) | 不接 |
3. 水阀(继电器控制)
| 继电器引脚 | 小熊派引脚 | 说明 |
|---|---|---|
| VCC | 5V | 电源 |
| GND | GND | 地线 |
| IN | GPIO_5 | 控制信号(低电平开启) |
水阀负载接线与水泵相同:
-
水阀正极 → 继电器 COM
-
水阀负极 → 电源 GND
-
继电器 NO → 电源正极
4. 风扇(继电器控制)
| 继电器引脚 | 小熊派引脚 | 说明 |
|---|---|---|
| VCC | 5V | 电源 |
| GND | GND | 地线 |
| IN | GPIO_8 | 控制信号(低电平开启) |
风扇负载接线同上。
5. 舵机 SG90(PWM 控制)
| 舵机引脚(颜色) | 小熊派引脚 | 说明 |
|---|---|---|
| 橙色/黄色(信号) | GPIO_7 | PWM 控制信号(50Hz) |
| 红色(正极) | 5V | 电源正极 |
| 棕色/黑色(负极) | GND | 电源负极 |
三、电源汇总
| 电源线 | 连接对象 |
|---|---|
| 5V / 3A 适配器 | 小熊派开发板(USB 口或 5V 引脚) |
| 5V 排针(开发板引出) | BH1750、继电器模块(VCC)、舵机(VCC)、LED(VCC) |
| 3.3V 排针(开发板引出) | SHT30(板载已接)、BH1750(VCC 可选 3.3V) |
| GND(共地) | 所有传感器、继电器、执行器的 GND 必须与开发板 GND 连接 |
⚠️ 如果使用 12V 水泵/水阀/风扇,需增加 12V 独立电源,并将继电器负载侧接 12V,同时将 12V 电源的 GND 与开发板 GND 单点共地。
四、接线结构简图(核心连接)
text
小熊派 BearPi-HM Nano ├─ GPIO_2 (SCL) ──┬─ SHT30 SCL │ └─ BH1750 SCL ├─ GPIO_3 (SDA) ──┬─ SHT30 SDA │ └─ BH1750 SDA ├─ GPIO_13 (ADC) ── CO2 传感器 (A) ├─ GPIO_9 (PWM) ── LED 补光灯 (PWM) ├─ GPIO_7 (PWM) ── 舵机 SG90 (信号) ├─ GPIO_4 ── 继电器1 (IN) ── 水泵 ├─ GPIO_5 ── 继电器2 (IN) ── 水阀 ├─ GPIO_8 ── 继电器3 (IN) ── 风扇 ├─ 5V ── 为 BH1750、继电器、舵机、LED 供电 ├─ 3.3V ── 为 SHT30(板载)供电 └─ GND (公共地) ── 所有模块 GND 汇集
五、接线检查清单
-
I2C 总线(GPIO_2/GPIO_3)仅连接 SHT30 和 BH1750,无冲突
-
继电器 IN 引脚默认高电平,低电平触发,确保上电时设备不误动作
-
舵机信号线单独走线,避免与 ADC 信号(GPIO_13)并行
-
所有模块的 GND 与开发板 GND 连通
-
电源容量:5V/3A 可满足 5V 执行器同时工作(峰值约 2.2A)
-
继电器负载侧接线时,电源适配器处于断电状态
4.通信协议
一、云平台通信(MQTT over TLS)
-
协议:MQTT v3.1.1,QoS=1,心跳60秒,断线指数退避重连。
-
主题:
-
属性上报:
$oc/devices/{device_id}/sys/properties/report(每30秒或变化触发) -
命令接收:
$oc/devices/{device_id}/sys/commands/#
-
-
安全:TLS 1.2加密,一机一密认证。
二、板级外设通信
-
I2C(100 kHz):SHT30(地址0x44)、BH1750(地址0x23),分别读取温湿度、光照。
-
ADC(10 Hz):GPIO_13采集CO₂传感器(0~3V → 0~5000ppm)。
-
GPIO(低电平有效):GPIO4/5/8分别控制水泵、水阀、风扇。
-
PWM:
-
GPIO9(1 kHz)控制LED亮度(0~100%)。
-
GPIO7(50 Hz)控制舵机角度(0.5~2.5ms脉宽对应0~180°)。
-
三、性能与可靠性
-
端到端延迟:本地控制<10ms,远程<200ms。
-
断网本地自治,恢复后补传数据(最多1000条),送达率≥99.9%。

开源鸿蒙跨平台开发社区汇聚开发者与厂商,共建“一次开发,多端部署”的开源生态,致力于降低跨端开发门槛,推动万物智联创新。
更多推荐

 0
0 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)