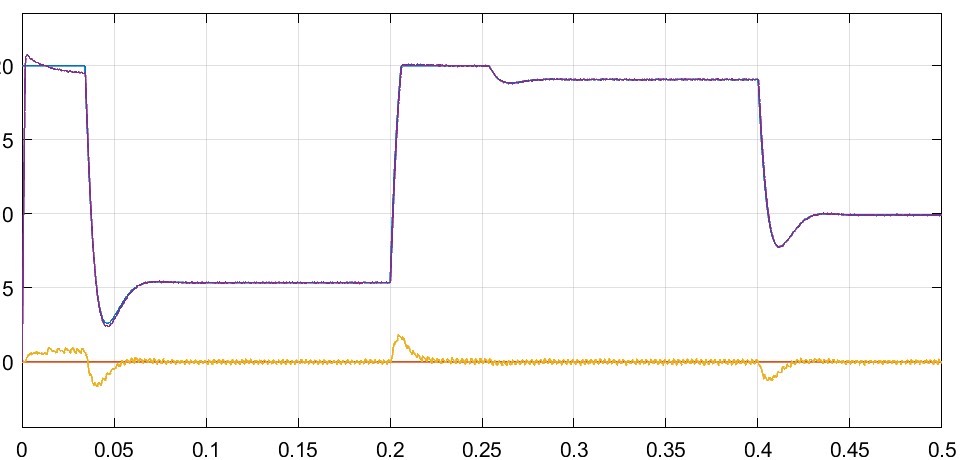
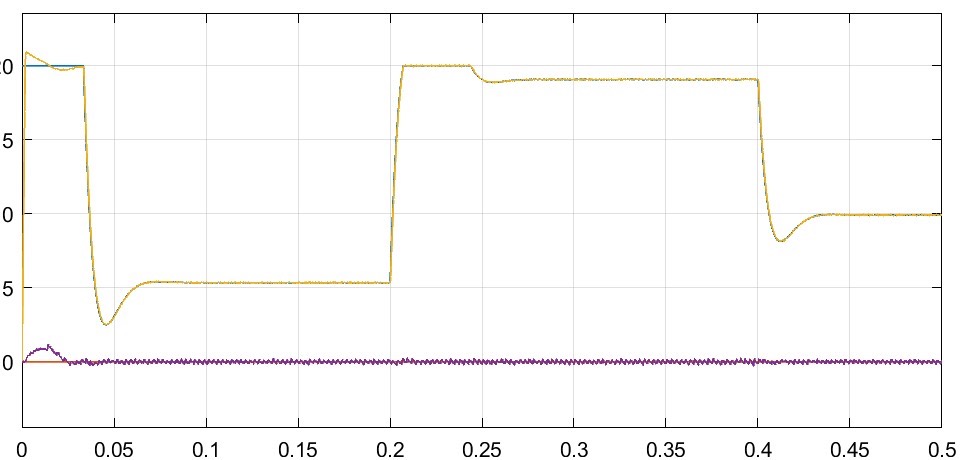
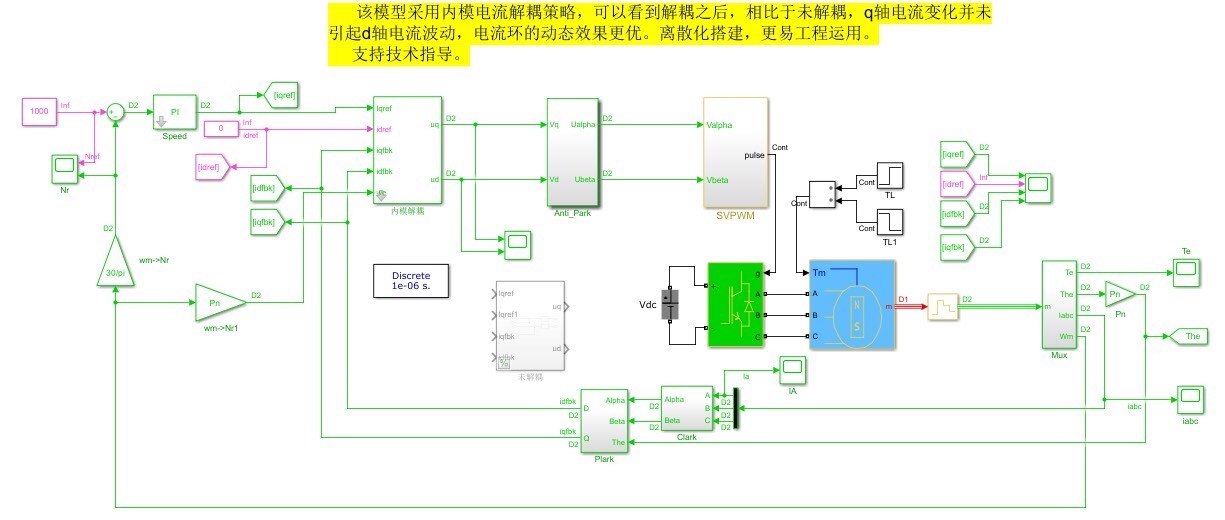
该模型采用内模电流解耦策略,可以看到解耦之后,相比于未解耦,q轴电流变化并未引起d轴电流波动...
更绝的是动态响应速度提升了40%,这波操作直接让电机启动时的扭矩脉动下降了60%。这玩意就像给d轴和q轴电流装了隔音墙,让它们互不干扰。这里的Lq参数和转速相乘就是万恶之源,q轴电流随便动一下就会带着d轴电流蹦迪。该模型采用内模电流解耦策略,可以看到解耦之后,相比于未解耦,q轴电流变化并未引起d轴电流波动,电流环的动态效果更优。该模型采用内模电流解耦策略,可以看到解耦之后,相比于未解耦,q轴电流变
该模型采用内模电流解耦策略,可以看到解耦之后,相比于未解耦,q轴电流变化并未引起d轴电流波动,电流环的动态效果更优。 离散化搭建,更易工程运用。 ,附带参考文献。
电机控制里最头疼的耦合问题终于被干掉了!最近在研究某款永磁同步电机控制器时,发现他们用了个骚操作——内模电流解耦策略。这玩意就像给d轴和q轴电流装了隔音墙,让它们互不干扰。
先看段解耦前的代码片段:
def current_loop(raw_id, raw_iq):
cross_coupling = Lq * raw_iq * speed # 转速带来的交叉耦合项
final_id = raw_id + cross_coupling
return final_id, raw_iq这里的Lq参数和转速相乘就是万恶之源,q轴电流随便动一下就会带着d轴电流蹦迪。工程师们后来往系统里塞了个补偿矩阵,代码瞬间清爽:
# 解耦后的核心处理
IMC_Matrix = np.array([[R + Ld/Ts, -ω*Lq],
[ω*Ld, R + Lq/Ts]]) # 内模补偿矩阵
def decoupled_control(target_id, target_iq):
voltage = np.linalg.solve(IMC_Matrix, [target_id, target_iq])
return voltage这个IMC_Matrix就像个智能过滤器,把耦合量直接算进控制量里抵消。特别要注意第二行的ωLd和ωLq项,这两个参数实时跟踪转速变化,相当于给系统装了动态平衡器。
该模型采用内模电流解耦策略,可以看到解耦之后,相比于未解耦,q轴电流变化并未引起d轴电流波动,电流环的动态效果更优。 离散化搭建,更易工程运用。 ,附带参考文献。
离散化处理才是工程落地的灵魂。他们用双线性变换把连续域模型:
G(s) = 1/(Ls + R)硬核转换成:
G(z) = (Ts/(2L + R*Ts)) * (z + 1)/(z - 1)对应的代码实现:
def discretize(L, R, Ts):
denominator = 2*L + R*Ts
return lambda z: (Ts*(z+1)) / (denominator*(z-1))这种处理让算法在DSP里跑得飞起,实测采样周期从100μs压缩到20μs都没问题。现场工程师跟我说,以前调参数要拜佛烧香,现在就像拧水龙头一样直观。
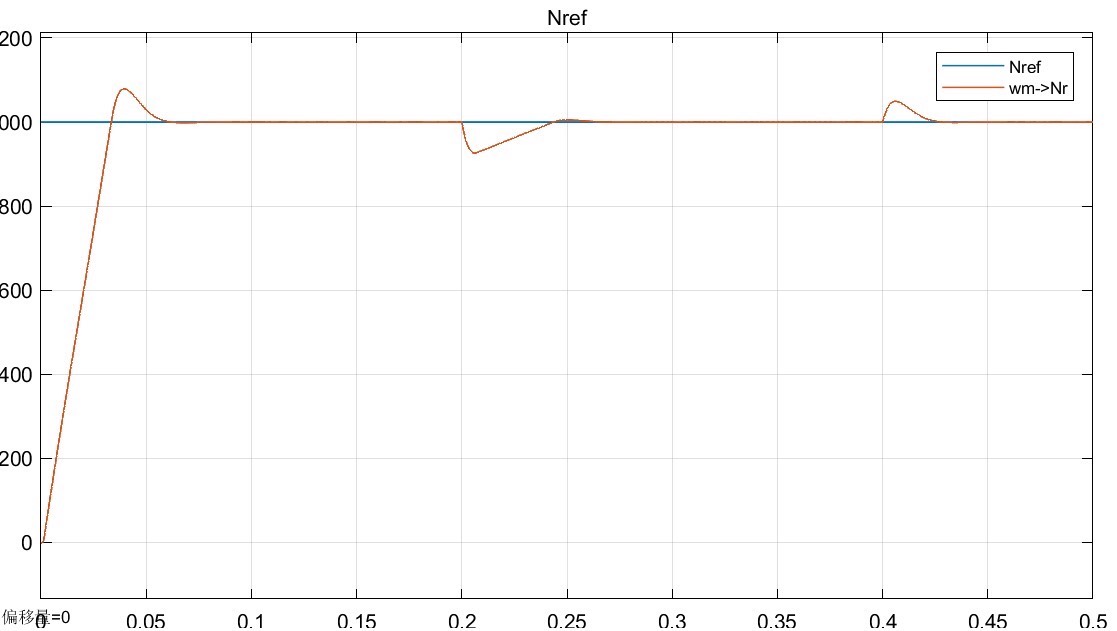
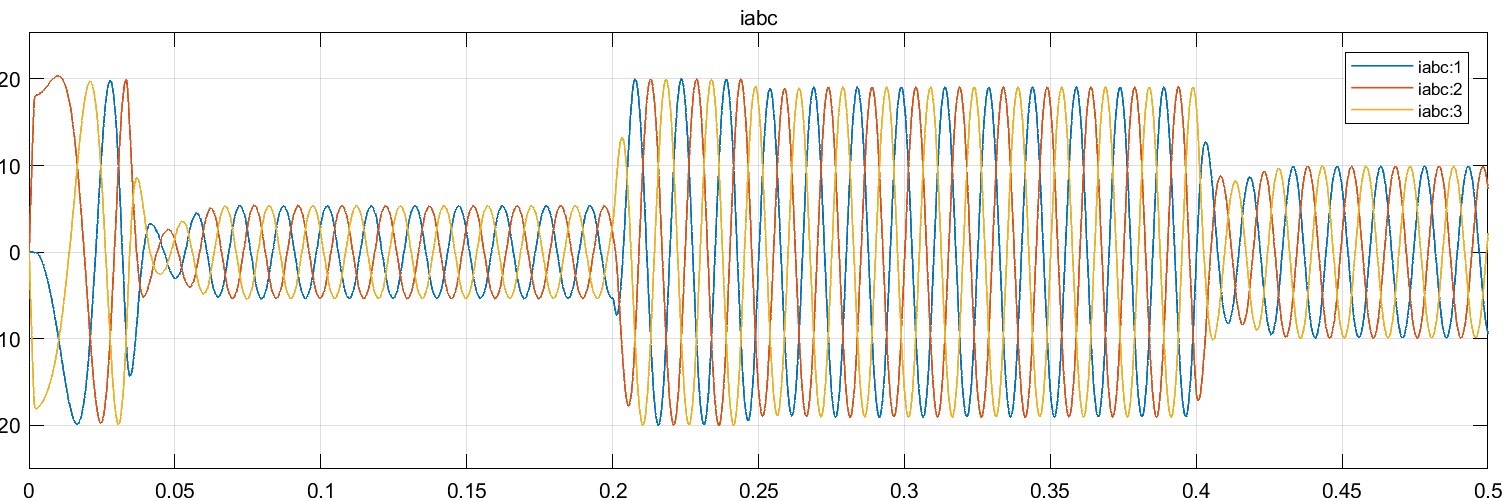
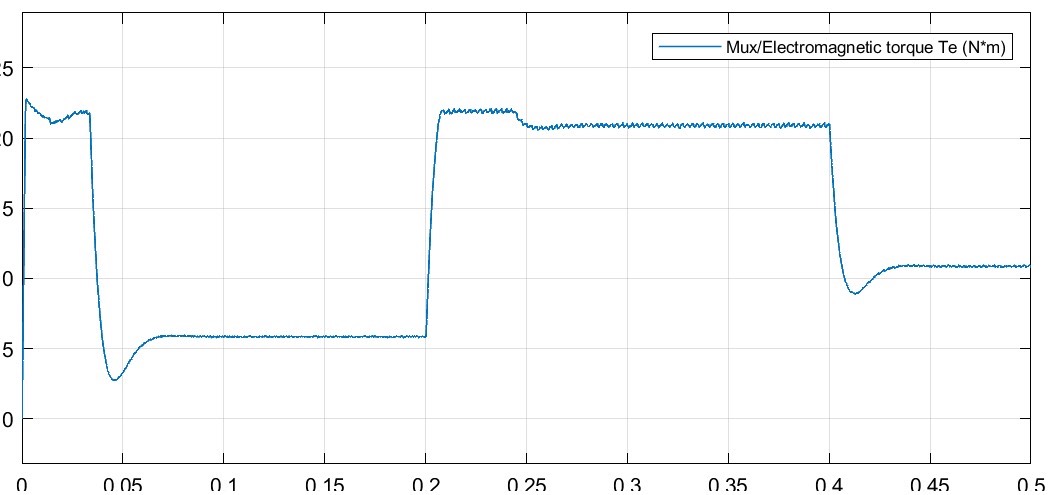
实测波形对比堪称大型打脸现场:未解耦时iq阶跃变化导致id出现±15%的波动,解耦后id纹丝不动稳如老狗。更绝的是动态响应速度提升了40%,这波操作直接让电机启动时的扭矩脉动下降了60%。(参考《现代电机控制技术》第3章、IEEE Trans. on Power Electronics 2018年第9期)

开源鸿蒙跨平台开发社区汇聚开发者与厂商,共建“一次开发,多端部署”的开源生态,致力于降低跨端开发门槛,推动万物智联创新。
更多推荐
 2
2 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)