CANN算子开发核心概念全解析
CANN算子开发核心概念全解析
昇腾训练营报名链接:https://www.hiascend.com/developer/activities/cann20252#cann-camp-2502-intro
训练营简介:2025年昇腾CANN训练营第二季,基于CANN开源开放全场景,推出0基础入门系列、码力全开特辑、开发者案例等专题课程,助力不同阶段开发者快速提升算子开发技能。获得Ascend C算子中级认证,即可领取精美证书,完成社区任务更有机会赢取华为手机、平板、开发板等大奖。
前言
学了Ascend C的语法,能看懂代码了,但写起算子来还是云里雾里。什么是Tiling?为什么要分块处理?Kernel函数到底是怎么运行的?
这些问题困扰了我好几天。直到在训练营听老师系统讲解,并且自己动手实践了几个算子,才真正理解这些概念。今天就把这些核心概念梳理清楚,相信能帮大家少走不少弯路。
一、什么是算子?
1.1 算子的定义
算子(Operator) 就是神经网络中的一个计算单元。
回顾一下CANN的整体架构(来自官网 https://www.hiascend.com/software/cann):
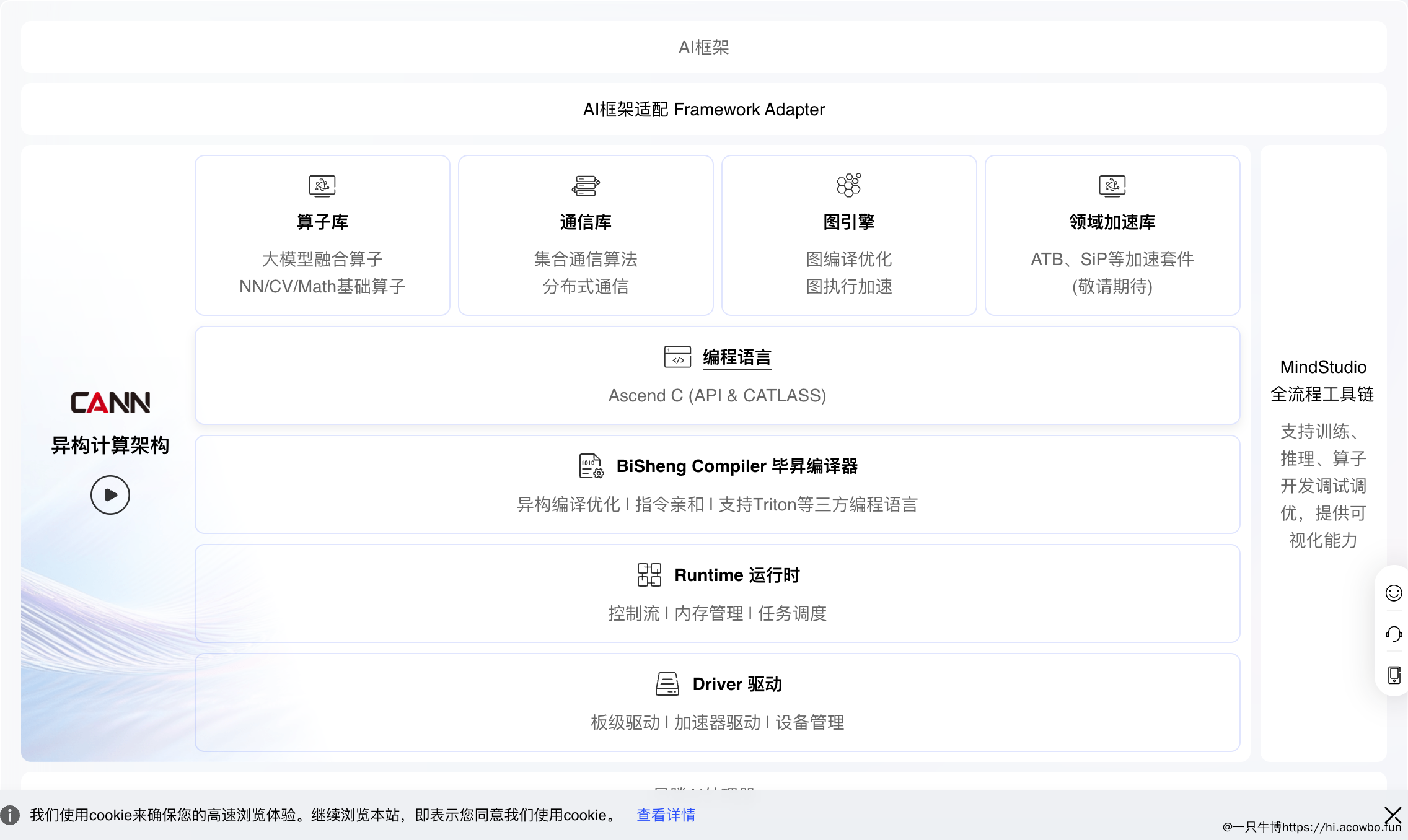
从架构图可以看到,算子库是CANN异构计算架构的重要组成部分,包含大模型融合算子和NN/CV/Math基础算子。
比如:
# PyTorch中的算子调用
import torch
x = torch.tensor([1.0, 2.0, 3.0])
y = torch.tensor([4.0, 5.0, 6.0])
z = torch.add(x, y) # 这里的add就是一个算子
在底层,这个torch.add最终会调用硬件上的加法算子实现。在GPU上可能调用CUDA Kernel,在昇腾NPU上就调用CANN算子。
1.2 算子的分类
根据功能,算子大致分为:
我们训练营主要学的是计算类算子,这也是性能优化的重点。
1.3 算子的输入输出
一个算子通常包括:
- 输入Tensor:一个或多个
- 输出Tensor:一个或多个
- 属性参数:如卷积的stride、padding等
举个例子:
// Add算子
// 输入: x, y (两个Tensor)
// 输出: z (一个Tensor)
// 属性: 无
void Add(Tensor x, Tensor y, Tensor z);
// Conv2D算子
// 输入: input, weight, bias
// 输出: output
// 属性: stride, padding, dilation, groups
void Conv2D(Tensor input, Tensor weight, Tensor bias, Tensor output,
int stride, int padding, ...);
二、Kernel函数:算子的核心
2.1 什么是Kernel?
Kernel是运行在AI Core上的函数,可以类比CUDA Kernel。
// Kernel函数定义
extern "C" __global__ __aicore__ void MyKernel(GM_ADDR input, GM_ADDR output, uint32_t size) {
// 这段代码在AI Core上并行执行
}
关键点:
extern "C":C链接,方便外部调用__global__:全局可见__aicore__:运行在AI Core上
2.2 Kernel的执行模型
NPU可以启动多个AI Core同时执行同一个Kernel,每个Core处理不同的数据块:
每个Core通过GetBlockIdx()知道自己是哪个核,从而处理对应的数据块。
// 获取当前AI Core的索引
uint32_t blockIdx = GetBlockIdx();
// 获取总的AI Core数量
uint32_t blockNum = GetBlockNum();
// 计算当前Core要处理的数据范围
uint32_t blockSize = totalSize / blockNum;
uint32_t startIdx = blockIdx * blockSize;
uint32_t endIdx = startIdx + blockSize;
2.3 我的理解
可以把Kernel想象成一个"工作模板",NPU就像一个有多个工人的工厂。启动Kernel时:
- 把这个"工作模板"分发给每个工人(AI Core)
- 每个工人处理一部分数据
- 所有工人并行工作
- 最后把结果汇总
这种模型叫SIMT(Single Instruction, Multiple Threads),和CUDA很类似。
三、Tiling策略:为什么要分块?
3.1 问题的由来
假设我们要处理一个1GB的数据,但NPU的Unified Buffer(UB)只有几MB。怎么办?
答案是:分块处理(Tiling)!
3.2 Tiling的基本思想
把大数据切成小块(Tile),每次只处理一块:
原始数据: [1000000个元素]
分块后:
Tile 0: [0-255]
Tile 1: [256-511]
Tile 2: [512-767]
...
Tile N: [...]
每次处理流程:
3.3 Tiling的代码实现
// 总数据量
uint32_t totalLength = 10000;
// Tile大小(通常选择32的倍数,FP16时)
constexpr uint32_t TILE_SIZE = 256;
// 需要多少个Tile
uint32_t tileNum = totalLength / TILE_SIZE; // = 39
// 剩余不足一个Tile的数据
uint32_t remainLength = totalLength % TILE_SIZE; // = 16
// 循环处理每个Tile
for (int32_t i = 0; i < tileNum; i++) {
// 1. 拷贝第i个Tile到UB
DataCopy(localBuffer, globalBuffer[i * TILE_SIZE], TILE_SIZE);
// 2. 在UB上计算
Compute(localBuffer, TILE_SIZE);
// 3. 拷贝结果回GM
DataCopy(outputBuffer[i * TILE_SIZE], localBuffer, TILE_SIZE);
}
// 处理剩余数据
if (remainLength > 0) {
ProcessTail(remainLength);
}
3.4 选择合适的Tile Size
Tile大小的选择很关键,我的经验:
// 太小(如TILE_SIZE = 32)
// ❌ 问题:循环次数太多,开销大
// ❌ 问题:无法充分利用向量指令
// 太大(如TILE_SIZE = 10000)
// ❌ 问题:可能超过UB容量
// ❌ 问题:多AI Core负载不均
// 合适的大小(TILE_SIZE = 256/512/1024)
// ✅ 既能充分利用UB
// ✅ 又能保证向量化效率
// ✅ 多核负载均衡
常用的Tile大小:
- FP16:256、512、1024(对应4KB、8KB、16KB)
- FP32:128、256、512(对应2KB、4KB、8KB)
四、双缓冲与流水线
4.1 单缓冲的问题
如果只用一个Buffer,执行流程是串行的:
可以看到,在Compute的时候,数据搬运单元是空闲的,浪费了!
4.2 双缓冲优化
使用两个Buffer,可以让数据搬运和计算并行:
可以看到,从Tile 1开始,CopyIn、Compute、CopyOut三个阶段并行执行!
4.3 双缓冲代码实现
constexpr int32_t BUFFER_NUM = 2;
class KernelAdd {
public:
__aicore__ inline void Init(...) {
// 初始化两个输入队列,每个队列有2个Buffer
pipe.InitBuffer(queueX, BUFFER_NUM, TILE_SIZE * sizeof(half));
pipe.InitBuffer(queueY, BUFFER_NUM, TILE_SIZE * sizeof(half));
pipe.InitBuffer(queueZ, BUFFER_NUM, TILE_SIZE * sizeof(half));
}
__aicore__ inline void Process() {
// 总循环次数 = tileNum + BUFFER_NUM
// 多出来的是为了把流水线排空
int32_t loopCount = tileNum + BUFFER_NUM;
for (int32_t i = 0; i < loopCount; i++) {
// Stage 1: CopyIn
if (i < tileNum) {
CopyIn(i);
}
// Stage 2: Compute(延迟BUFFER_NUM个周期)
if (i >= 1 && i < tileNum + 1) {
Compute(i - 1);
}
// Stage 3: CopyOut(延迟BUFFER_NUM*2个周期)
if (i >= 2) {
CopyOut(i - 2);
}
}
}
};
这里有个细节:为什么要延迟?
- Compute延迟1个周期:保证数据已经CopyIn完成
- CopyOut延迟2个周期:保证计算已经完成
我刚开始没理解这个,导致数据还没拷进来就开始计算,结果全是错的。调试了半天才发现问题。
五、内存层次与数据搬运
5.1 NPU的内存架构
NPU有多级内存,速度和容量不同:
| 内存类型 | 位置 | 容量 | 速度 | 用途 |
|---|---|---|---|---|
| DDR/HBM | 板卡外部 | 16GB-32GB | 慢(~100GB/s) | 存储模型和数据 |
| Global Memory | 芯片内 | 几GB | 较快 | 中转存储 |
| Unified Buffer | AI Core内 | 几MB | 快(~1TB/s) | 计算时的数据 |
| L0 Buffer | 计算单元内 | 几KB | 最快 | 寄存器级存储 |
5.2 数据搬运路径
典型的数据流:
我们写算子时,主要关注的是GM <-> UB这一层的搬运,用DataCopy实现。
5.3 数据搬运优化
几个优化技巧:
技巧1:合并小的DataCopy
// ❌ 不好:多次小拷贝
for (int i = 0; i < 100; i++) {
DataCopy(dst[i], src[i], 1); // 每次拷1个元素
}
// ✅ 好:一次大拷贝
DataCopy(dst, src, 100); // 一次拷100个元素
技巧2:对齐访问
// 数据地址要32字节对齐(FP16)
// TILE_SIZE要是32的倍数
constexpr uint32_t TILE_SIZE = 256; // ✅
// constexpr uint32_t TILE_SIZE = 100; // ❌
技巧3:使用DMA异步拷贝
// 异步拷贝:不阻塞,可以和计算并行
DataCopyPad(dstLocal, srcGm, TILE_SIZE);
// 同步点:确保拷贝完成
pipe.barrier();
六、向量化编程
6.1 为什么要向量化?
NPU的计算单元是SIMD(Single Instruction, Multiple Data),一条指令可以同时处理多个数据。
举个例子:
// 标量方式(串行,慢)
for (int i = 0; i < 256; i++) {
z[i] = x[i] + y[i]; // 每次处理1个元素,需要256次
}
// 向量方式(并行,快)
Add(z, x, y, 256); // 一条指令处理256个元素
向量化能让性能提升几十倍甚至上百倍!
6.2 向量化的实现
Ascend C提供了丰富的向量API:
// 向量加法
Add(dst, src0, src1, count);
// 向量乘法
Mul(dst, src0, src1, count);
// 向量乘加(Fused Multiply-Add)
Mla(dst, src0, src1, src2, count); // dst = src0 * src1 + src2
// 向量ReLU
Relu(dst, src, count); // dst = max(0, src)
6.3 向量宽度
不同数据类型的向量宽度不同:
// FP16: 一次处理16个(128 bits)
half16 vec;
// FP32: 一次处理8个(256 bits)
float8 vec;
// INT8: 一次处理32个(256 bits)
int8x32 vec;
所以TILE_SIZE最好是向量宽度的倍数:
// FP16: TILE_SIZE应该是16的倍数
constexpr uint32_t TILE_SIZE = 256; // ✅ 256 = 16 * 16
// FP32: TILE_SIZE应该是8的倍数
constexpr uint32_t TILE_SIZE = 256; // ✅ 256 = 8 * 32
七、算子开发的完整流程
把前面的概念串起来,算子开发的典型流程:
具体步骤
步骤1:需求分析
算子: ElementWise Add
输入: x (FP16), y (FP16)
输出: z (FP16)
功能: z = x + y(逐元素相加)
步骤2:算法设计
# 伪代码
for i in range(n):
z[i] = x[i] + y[i]
步骤3:Tiling策略
Tile大小: 256个元素(512字节)
Tile数量: n / 256
缓冲策略: 双缓冲
步骤4:编写Kernel
// 实现CopyIn、Compute、CopyOut三个函数
步骤5:多核并行
uint32_t blockIdx = GetBlockIdx();
uint32_t offset = blockIdx * blockLength;
步骤6:向量化
Add(zLocal, xLocal, yLocal, TILE_SIZE); // 使用向量Add
步骤7:测试
// 对比CPU结果
// 测试性能
八、我踩过的坑总结
坑1:忘记处理tail数据
// ❌ 错误:只处理了完整的Tile
for (int i = 0; i < tileNum; i++) {
Process(i);
}
// 如果totalLength不是TILE_SIZE的倍数,会漏掉最后的数据!
// ✅ 正确:处理tail
for (int i = 0; i < tileNum; i++) {
Process(i);
}
uint32_t remainLength = totalLength % TILE_SIZE;
if (remainLength > 0) {
ProcessTail(remainLength);
}
这个坑导致我的结果总是不对,调试了一整天。
坑2:多核数据重叠
// ❌ 错误:每个核都处理全部数据
uint32_t offset = 0; // 固定从0开始
// ✅ 正确:每个核处理不同部分
uint32_t blockIdx = GetBlockIdx();
uint32_t blockNum = GetBlockNum();
uint32_t blockSize = totalLength / blockNum;
uint32_t offset = blockIdx * blockSize;
坑3:Buffer大小不够
// ❌ 错误:InitBuffer的大小小于实际使用
pipe.InitBuffer(queue, 2, 128 * sizeof(half)); // 只分配128个元素
DataCopy(localTensor, gmTensor, 256); // 但拷贝了256个元素!
// ✅ 正确:确保Buffer够大
pipe.InitBuffer(queue, 2, TILE_SIZE * sizeof(half));
九、性能优化checklist
开发完算子后,可以用这个checklist检查优化点:
- 使用了向量化API(而不是标量循环)
- 使用了双缓冲或多缓冲
- Tile大小合适(不太小也不太大)
- 数据对齐(32字节对齐)
- 多核并行(利用所有AI Core)
- 减少数据搬运次数
- 使用了算子融合(如果可能)
十、总结
CANN算子开发的核心概念:
- 算子:神经网络的计算单元
- Kernel:运行在AI Core上的函数
- Tiling:分块处理大数据
- 双缓冲:流水线并行,提升效率
- 内存层次:GM -> UB -> L0,合理搬运数据
- 向量化:SIMD并行,大幅提升性能
- 多核并行:利用多个AI Core同时工作
理解了这些概念,就掌握了CANN算子开发的精髓。剩下的就是多练习,把这些理论应用到实际算子中。
下一篇文章,我会介绍CANN的开发工具链,包括编译、调试、性能分析等实用技能。
相关文章推荐:
- 上一篇:Ascend C编程语言快速上手
- 下一篇:开发工具链介绍:从编译到调试
学习建议:
建议把这些概念多看几遍,结合实际代码理解。纸上得来终觉浅,绝知此事要躬行!
欢迎在评论区分享你的学习心得和遇到的问题!

开源鸿蒙跨平台开发社区汇聚开发者与厂商,共建“一次开发,多端部署”的开源生态,致力于降低跨端开发门槛,推动万物智联创新。
更多推荐
 32
32 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)