从零学习自动驾驶Lattice规划算法(下
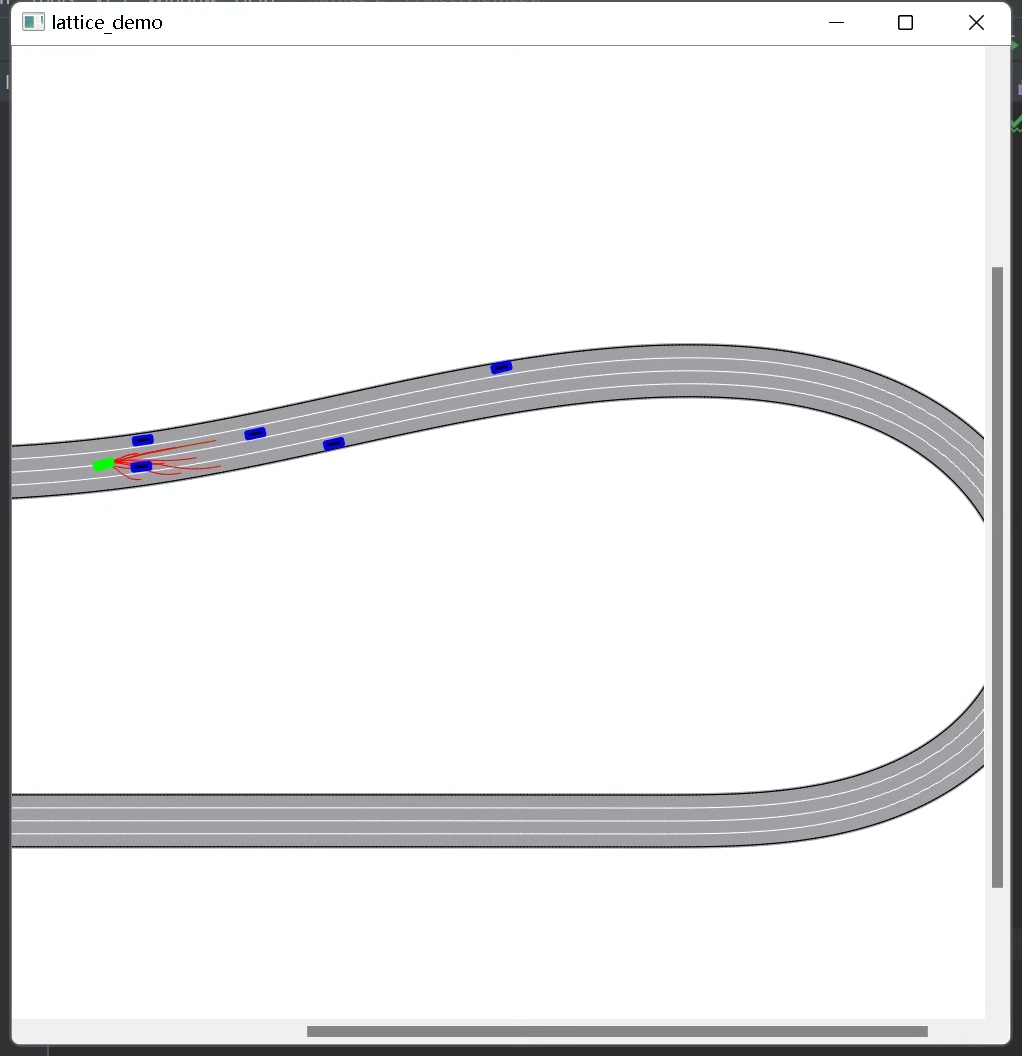
从零学习自动驾驶Lattice规划算法(下) 轨迹采样 轨迹评估 碰撞检测 包含matlab代码实现和cpp代码实现,方便对照学习。 cpp代码用vs2019编译 依赖qt5.15做可视化 更新: 1 优化绘图 2 增加轨迹预测模块 3 增加从mat文件加载场景的功能,方便场景自定义
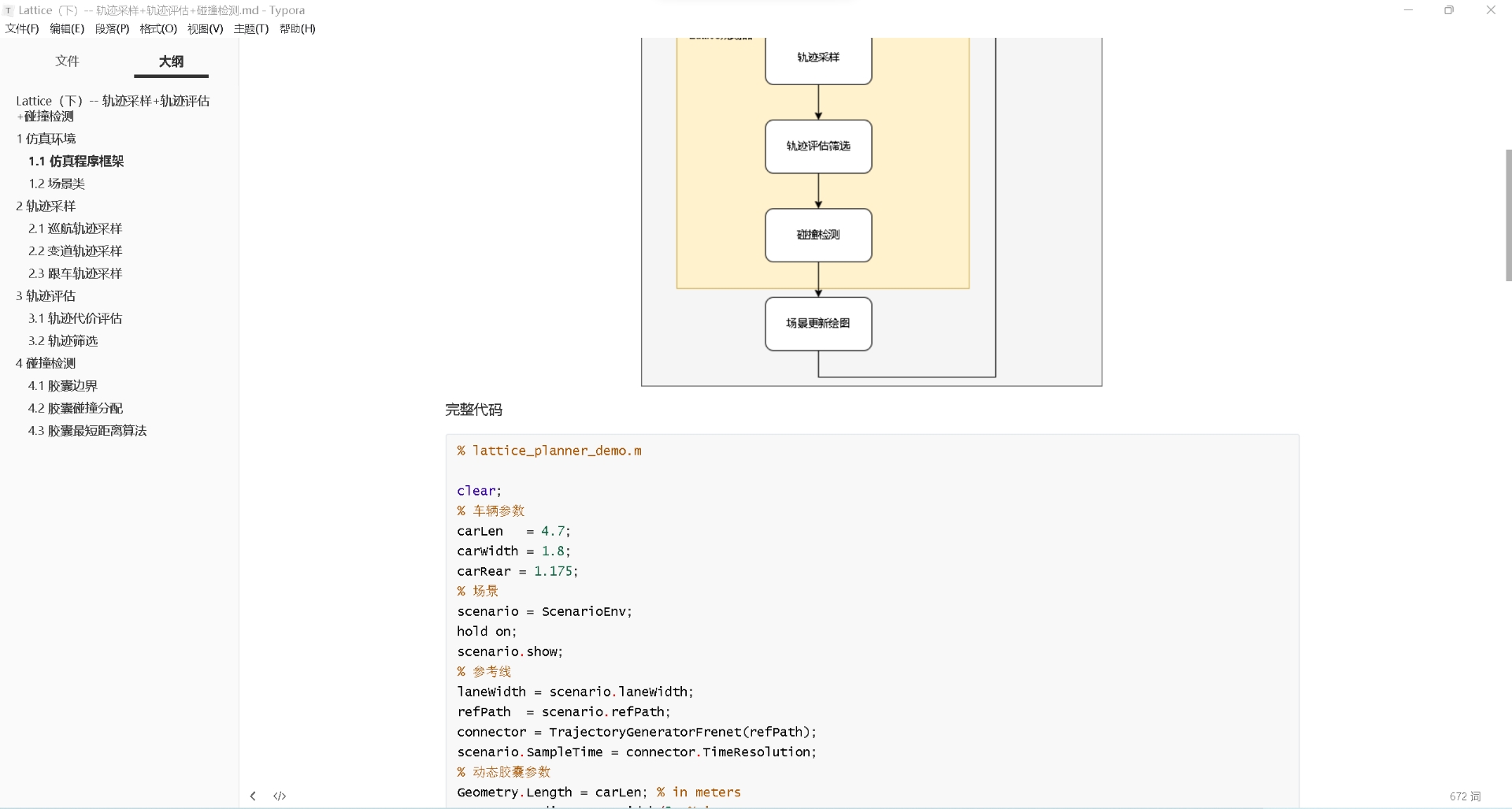
在自动驾驶领域,Lattice规划算法是实现智能路径规划的重要技术。今天我们接着上一篇,深入探讨轨迹采样、轨迹评估以及碰撞检测,并且为大家呈现Matlab和C++的代码实现,方便大家对照学习。
轨迹采样
轨迹采样是为了在车辆可行驶的空间中生成一系列可能的轨迹。在Matlab中,我们可以这样实现简单的轨迹采样:
% 轨迹采样参数设置
num_samples = 100;
step_size = 0.1;
t = 0:step_size:10;
% 初始化轨迹矩阵
trajectories = zeros(length(t), num_samples);
for i = 1:num_samples
% 简单的多项式轨迹采样
a = rand;
b = rand;
c = rand;
trajectories(:, i) = a * t.^2 + b * t + c;
end这里我们先设置了采样的数量numsamples和步长stepsize,然后初始化了一个轨迹矩阵trajectories。通过循环,每次生成随机的多项式系数a、b、c,从而得到不同的轨迹。
在C++中,借助Qt框架实现轨迹采样。假设我们已经有了一个TrajectorySampler类:
#include <QVector>
#include <cmath>
#include <random>
class TrajectorySampler {
public:
TrajectorySampler(int numSamples, double stepSize, double endTime)
: numSamples(numSamples), stepSize(stepSize), endTime(endTime) {}
QVector<QVector<double>> sampleTrajectories() {
QVector<QVector<double>> trajectories;
std::random_device rd;
std::mt19937 gen(rd());
std::uniform_real_distribution<> dis(0.0, 1.0);
for (int i = 0; i < numSamples; ++i) {
double a = dis(gen);
double b = dis(gen);
double c = dis(gen);
QVector<double> trajectory;
for (double t = 0; t <= endTime; t += stepSize) {
double pos = a * std::pow(t, 2) + b * t + c;
trajectory.append(pos);
}
trajectories.append(trajectory);
}
return trajectories;
}
private:
int numSamples;
double stepSize;
double endTime;
};在C++代码中,我们通过std::random_device和std::mt19937实现随机数生成,同样生成一系列多项式轨迹。
轨迹评估
轨迹评估用于判断生成的轨迹是否满足自动驾驶的各种要求,比如安全性、舒适性等。下面是Matlab中的简单轨迹评估示例:
% 假设已经有了采样得到的轨迹trajectories
% 定义一个简单的评估函数,这里只考虑轨迹长度
evaluateTrajectory = @(traj) sum(diff(traj).^2);
evaluation_results = zeros(1, num_samples);
for i = 1:num_samples
evaluation_results(i) = evaluateTrajectory(trajectories(:, i));
end这里我们定义了一个简单的评估函数evaluateTrajectory,通过计算轨迹各点间差值平方和来评估轨迹长度。
在C++中,我们在TrajectoryEvaluator类中实现类似功能:
#include <QVector>
#include <cmath>
class TrajectoryEvaluator {
public:
static double evaluateTrajectory(const QVector<double>& traj) {
double result = 0.0;
for (int i = 1; i < traj.size(); ++i) {
result += std::pow(traj[i] - traj[i - 1], 2);
}
return result;
}
};碰撞检测
碰撞检测是自动驾驶规划中至关重要的环节,确保车辆行驶安全。以下是Matlab的碰撞检测示例:
% 假设车辆位置和尺寸
vehicle_x = 5;
vehicle_y = 5;
vehicle_width = 2;
vehicle_length = 4;
% 假设障碍物位置和尺寸
obstacle_x = 10;
obstacle_y = 10;
obstacle_width = 3;
obstacle_length = 5;
% 碰撞检测
is_collision = (abs(vehicle_x - obstacle_x) < (vehicle_width + obstacle_width) / 2) &&...
(abs(vehicle_y - obstacle_y) < (vehicle_length + obstacle_length) / 2);这段代码通过比较车辆和障碍物的位置及尺寸来判断是否发生碰撞。
在C++中,实现一个简单的碰撞检测函数:
#include <cmath>
bool collisionDetection(double vehicleX, double vehicleY, double vehicleWidth, double vehicleLength,
double obstacleX, double obstacleY, double obstacleWidth, double obstacleLength) {
return (std::abs(vehicleX - obstacleX) < (vehicleWidth + obstacleWidth) / 2) &&
(std::abs(vehicleY - obstacleY) < (vehicleLength + obstacleLength) / 2);
}更新内容
1. 优化绘图
在Matlab中,我们可以通过设置图形属性来优化绘图,比如改变线条颜色、标记样式等:
figure;
for i = 1:num_samples
plot(t, trajectories(:, i), 'Color', rand(1, 3), 'LineWidth', 1.5, 'Marker', 'o');
hold on;
end
xlabel('Time');
ylabel('Position');
title('Sampled Trajectories');
grid on;在C++中,借助Qt的绘图功能优化绘图。假设我们有一个TrajectoryPlotter类:
#include <QPainter>
#include <QColor>
class TrajectoryPlotter {
public:
void plotTrajectories(const QVector<QVector<double>>& trajectories, const QVector<double>& t) {
QPixmap pixmap(800, 600);
pixmap.fill(Qt::white);
QPainter painter(&pixmap);
painter.setPen(Qt::black);
painter.drawText(10, 20, "Sampled Trajectories");
painter.drawLine(50, 50, 50, 550);
painter.drawLine(50, 550, 750, 550);
for (const auto& traj : trajectories) {
QColor color = QColor::fromRgbF(qrand() / (double)RAND_MAX, qrand() / (double)RAND_MAX, qrand() / (double)RAND_MAX);
painter.setPen(color);
for (int i = 1; i < traj.size(); ++i) {
int x1 = static_cast<int>(50 + t[i - 1] * 700 / t.back());
int y1 = static_cast<int>(550 - traj[i - 1] * 500 / 10);
int x2 = static_cast<int>(50 + t[i] * 700 / t.back());
int y2 = static_cast<int>(550 - traj[i] * 500 / 10);
painter.drawLine(x1, y1, x2, y2);
}
}
pixmap.save("trajectories.png");
}
};2. 增加轨迹预测模块
在Matlab中,可以通过扩展现有的轨迹采样和评估部分来实现简单的轨迹预测:
% 假设已经有评估后的轨迹evaluation_results
% 选择评估结果最好的轨迹作为预测轨迹
[~, best_index] = min(evaluation_results);
predicted_trajectory = trajectories(:, best_index);在C++中,在TrajectoryPredictor类中实现:
#include <QVector>
#include <limits>
class TrajectoryPredictor {
public:
QVector<double> predictTrajectory(const QVector<QVector<double>>& trajectories, const QVector<double>& evaluationResults) {
double minResult = std::numeric_limits<double>::max();
int bestIndex = 0;
for (int i = 0; i < evaluationResults.size(); ++i) {
if (evaluationResults[i] < minResult) {
minResult = evaluationResults[i];
bestIndex = i;
}
}
return trajectories[bestIndex];
}
};3. 增加从mat文件加载场景的功能,方便场景自定义
在Matlab中,可以使用load函数加载mat文件:
load('scene.mat');
% scene.mat文件中假设包含车辆和障碍物的相关参数
vehicle_x = scene.vehicle_x;
vehicle_y = scene.vehicle_y;
% 其他参数同理加载在C++中,需要借助第三方库来读取mat文件,比如matio库:
#include <matio.h>
#include <iostream>
int main() {
mat_t* matfp = Mat_Open("scene.mat", MAT_ACC_RDONLY);
if (matfp == NULL) {
std::cerr << "Error opening mat file" << std::endl;
return 1;
}
matvar_t* matvar = Mat_VarRead(matfp, "vehicle_x");
if (matvar!= NULL) {
double vehicleX = *(double*)matvar->data;
std::cout << "Vehicle X: " << vehicleX << std::endl;
Mat_VarFree(matvar);
}
Mat_Close(matfp);
return 0;
}希望通过以上Matlab和C++代码实现以及相关功能更新,能帮助大家更好地理解和学习自动驾驶Lattice规划算法。

开源鸿蒙跨平台开发社区汇聚开发者与厂商,共建“一次开发,多端部署”的开源生态,致力于降低跨端开发门槛,推动万物智联创新。
更多推荐

 5
5 0
0- 0



 已为社区贡献10条内容
已为社区贡献10条内容

所有评论(0)