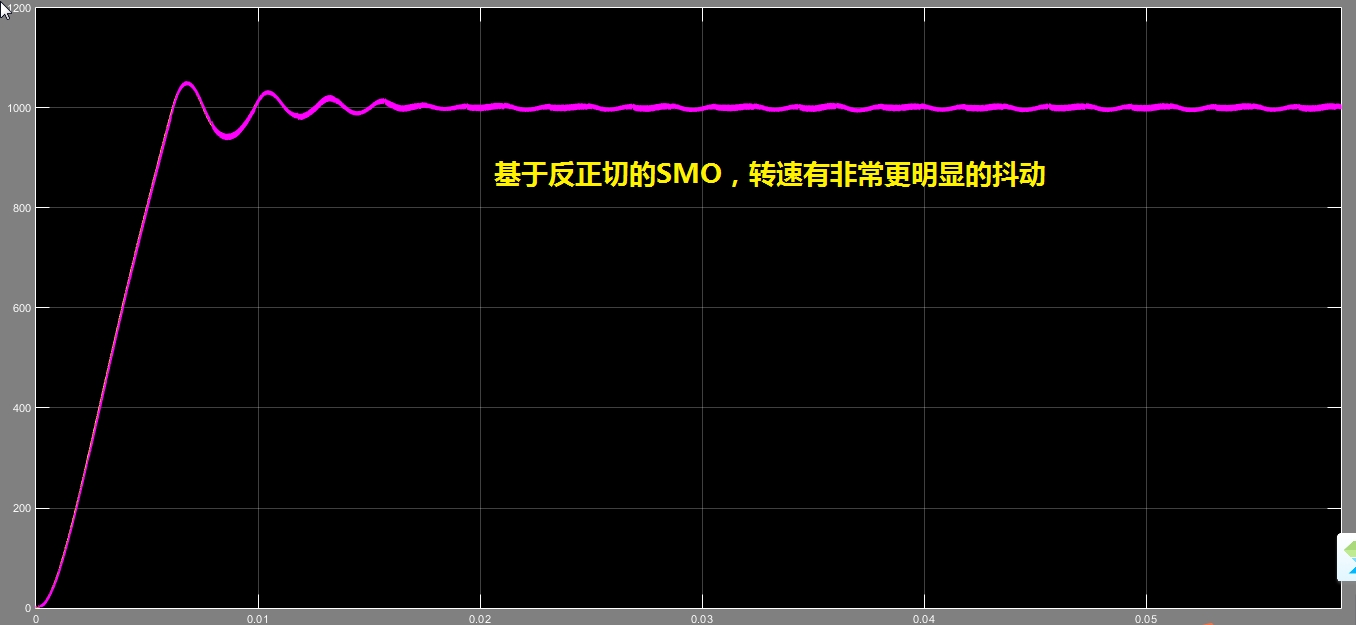
永磁同步电机的无感控制里有个头疼的问题:转速抖得跟筛糠似的。传统滑模观测器用反正切算角度,差分得转速,这招在实验室还行,真上工程现场就容易翻车
调试时先给KI设零,慢慢增大KP直到系统开始震荡,然后退回80%值,最后补点KI来压制稳态误差。对比测试时,同样的电机负载突变场景,传统方法转速波动能到±50rpm,PLL版本能压在±10rpm以内。这提醒我们,算法框架固定,但工程细节还得跟着具体电机特性走。基于PLL的SMO滑模观测器算法,永磁同步电机无传感器矢量控制,跟基于反正切的SMO做对比,可以有效消除转速的抖动。基于PLL的SMO滑模观
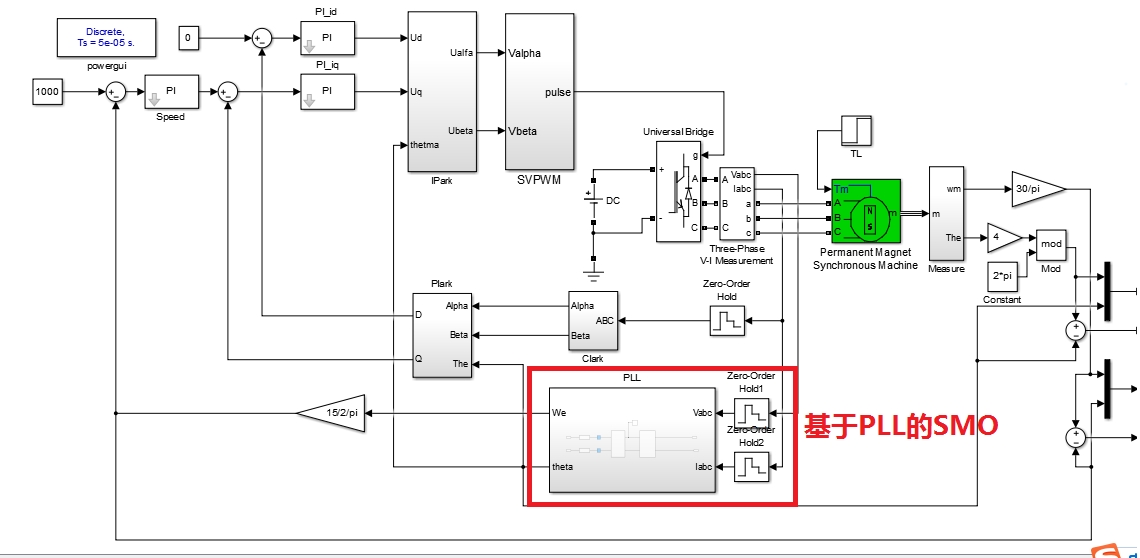
基于PLL的SMO滑模观测器算法,永磁同步电机无传感器矢量控制,跟基于反正切的SMO做对比,可以有效消除转速的抖动。
咱先看老方法怎么玩的。滑模观测器吐出反电动势ealpha和ebeta后,代码通常是这样的:
// 传统反正切法
float theta = atan2f(e_beta, e_alpha);
float speed = (theta - last_theta) / CONTROL_PERIOD;
last_theta = theta;这代码看着清爽,但实测时转速波形全是毛刺。问题出在微分环节——电机稍有噪声,角度差分直接放大成转速抖动。后来工程师们尝试加低通滤波,结果转速响应又变得拖泥带水。
这时候PLL(锁相环)观测器开始冒头。核心思想是把角度跟踪当成相位同步问题,代码实现完全不同:
// PLL结构核心更新
float sin_theta = arm_sin_f32(pll.theta);
float cos_theta = arm_cos_f32(pll.theta);
float error = e_alpha * cos_theta - e_beta * sin_theta; // 相位检测器
pll.integral += error * PLL_KI * CONTROL_PERIOD; // 积分环节
pll.theta += (error * PLL_KP + pll.integral) * CONTROL_PERIOD;
pll.speed = error * PLL_KP + pll.integral; // 转速直接输出这里藏着三个玄机:相位检测器替代了反正切,积分环节充当天然滤波器,转速直接从PLL内部状态获取。对比测试时,同样的电机负载突变场景,传统方法转速波动能到±50rpm,PLL版本能压在±10rpm以内。
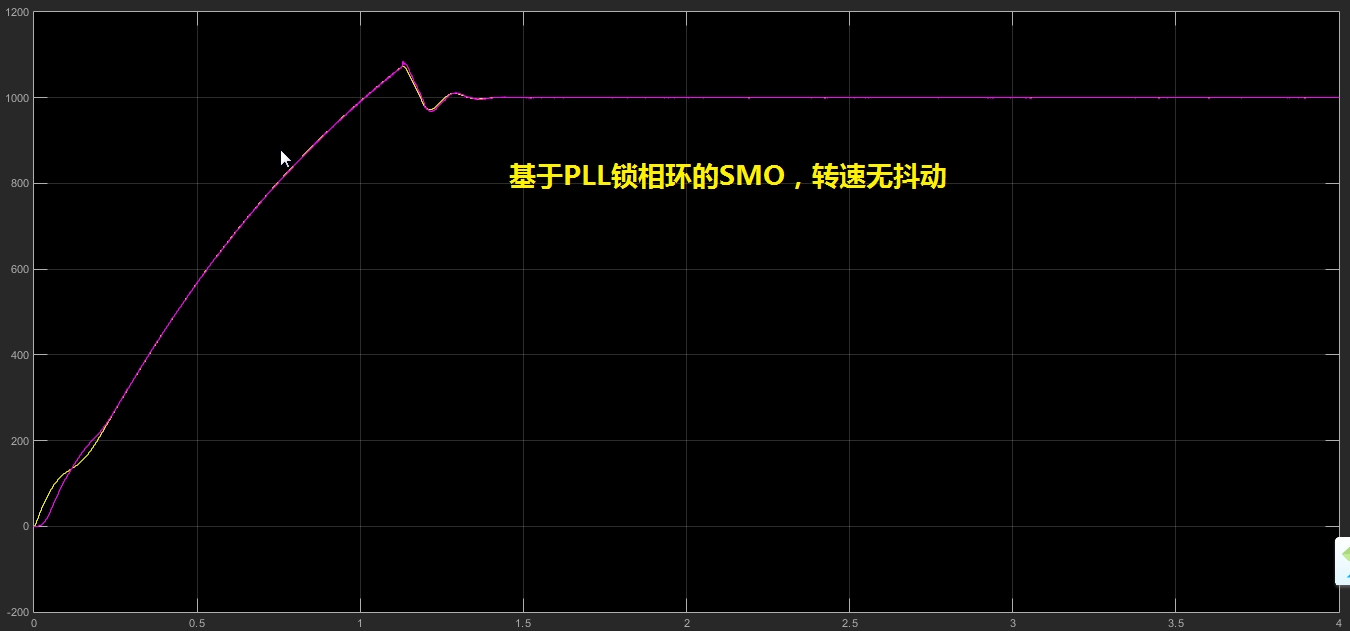
基于PLL的SMO滑模观测器算法,永磁同步电机无传感器矢量控制,跟基于反正切的SMO做对比,可以有效消除转速的抖动。
参数整定也有门道。KP决定跟踪速度,KI影响抗扰能力。调试时先给KI设零,慢慢增大KP直到系统开始震荡,然后退回80%值,最后补点KI来压制稳态误差。实测发现当KP=0.5、KI=20时,电机从零速拉到额定转速只要0.2秒,还几乎看不到超调。
不过PLL也不是万能药。遇到过有个项目电机参数不准,导致反电动势观测偏差大。这时候在相位检测器后面叠了个自适应补偿器:
// 自适应补偿
if(fabsf(pll.speed) > 100.0f) {
float compensate = SOME_ADAPTIVE_FUNCTION(...);
error += compensate;
}改完后带载启动成功率从70%提到95%。这提醒我们,算法框架固定,但工程细节还得跟着具体电机特性走。后来团队用这套方案搞定了纺织机械的共直流母线多电机同步,算是验证了PLL观测器的实战能力。

开源鸿蒙跨平台开发社区汇聚开发者与厂商,共建“一次开发,多端部署”的开源生态,致力于降低跨端开发门槛,推动万物智联创新。
更多推荐

 0
0 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)