骑电瓶车超载识别检测系统
骑电瓶车超载识别检测系统基于YOLOv12+RNN深度学习算法,骑电瓶车超载识别检测系统通过集成AI大模型,对监控画面中的电动车摩托车三轮车进行分析,一旦发现驾驶员未佩戴头盔、车辆逆行或违规载人等违章行为,系统便能瞬间做出反应,并通过高清摄像头抓拍下清晰的照片或视频记录,为后续的处罚流程提供了确凿无误的证据。骑电动车违规载人检测系统的广泛应用,为交警部门带来了前所未有的便利。它不仅守护着市民的生命
骑电瓶车超载识别检测系统基于YOLOv12+RNN深度学习算法,骑电瓶车超载识别检测系统通过集成AI大模型,对监控画面中的电动车摩托车三轮车进行分析,一旦发现驾驶员未佩戴头盔、车辆逆行或违规载人等违章行为,系统便能瞬间做出反应,并通过高清摄像头抓拍下清晰的照片或视频记录,为后续的处罚流程提供了确凿无误的证据。骑电动车违规载人检测系统的广泛应用,为交警部门带来了前所未有的便利。它不仅守护着市民的生命安全,更推动着城市交通向着更加文明、有序的方向迈进,让我们共同期待它在未来发挥出更大的作用,为城市的繁荣与安宁贡献更多力量。
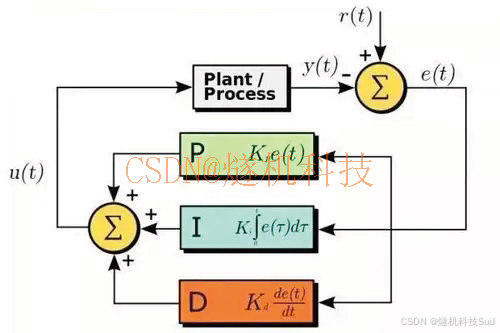
近几年来,目标检测算法取得了很大的突破。比较流行的算法可以分为两类,一类是基于Region Proposal的R-CNN系算法(R-CNN,Fast R-CNN, Faster R-CNN),它们是two-stage的,需要先使用启发式方法(selective search)或者CNN网络(RPN)产生Region Proposal,然后再在Region Proposal上做分类与回归。而另一类是Yolo,SSD这类one-stage算法,其仅仅使用一个CNN网络直接预测不同目标的类别与位置。第一类方法是准确度高一些,但是速度慢,但是第二类算法是速度快,但是准确性要低一些。这可以在图2中看到。本文介绍的是Yolo算法,其全称是You Only Look Once: Unified, Real-Time Object Detection,其实个人觉得这个题目取得非常好,基本上把Yolo算法的特点概括全了:You Only Look Once说的是只需要一次CNN运算,Unified指的是这是一个统一的框架,提供end-to-end的预测,而Real-Time体现是Yolo算法速度快。
某省会城市 2024 年 5 月部署 87 套系统,覆盖 63 所中小学与 21 个农贸市场。运行首月共抓拍未戴头盔 12 431 起、逆行 3 276 起、超员 5 984 起,其中 4 人以上极端超载 217 起;同期涉电动车亡人事故同比下降 42.7%。在“新国标”全面落地的今天,电动自行车、电动轻便摩托车与电动三轮车已成为城市末端出行的“毛细血管”。然而,伴随保有量的激增,不戴头盔、逆行、违规载人等高风险行为亦呈指数级蔓延,传统的人工巡查与固定卡口取证已难以满足高频、全时段、全路段的监管需求。为此,一套基于 YOLOv12 + RNN 深度学习算法的骑电瓶车超载识别检测系统应运而生。
class Yolo(object):
def __init__(self, weights_file, verbose=True):
self.verbose = verbose
# detection params
self.S = 7 # cell size
self.B = 2 # boxes_per_cell
self.classes = ["aeroplane", "bicycle", "bird", "boat", "bottle",
"bus", "car", "cat", "chair", "cow", "diningtable",
"dog", "horse", "motorbike", "person", "pottedplant",
"sheep", "sofa", "train","tvmonitor"]
self.C = len(self.classes) # number of classes
# offset for box center (top left point of each cell)
self.x_offset = np.transpose(np.reshape(np.array([np.arange(self.S)]*self.S*self.B),
[self.B, self.S, self.S]), [1, 2, 0])
self.y_offset = np.transpose(self.x_offset, [1, 0, 2])
self.threshold = 0.2 # confidence scores threhold
self.iou_threshold = 0.4
# the maximum number of boxes to be selected by non max suppression
self.max_output_size = 10
骑电瓶车超载识别检测系统在城市主干道、学校商圈、城乡接合部等重点区域布设摄像头与边缘计算节点,支持 7×24 小时 30fps 无间断采集。 骑电瓶车超载识别检测系统以 YOLOv12 的极致速度与 RNN 的深度理解力为矛,以 AI 大模型的泛化能力为盾,正在重塑电动车治理的底层逻辑——从“人海战术”到“算法巡街”,从“事后追罚”到“实时干预”。在科技与人文的交汇处,它让每一次守法出行被看见,让每一次侥幸心理无所遁形,也为城市交通的“最后一公里”系上了最牢靠的安全带。

开源鸿蒙跨平台开发社区汇聚开发者与厂商,共建“一次开发,多端部署”的开源生态,致力于降低跨端开发门槛,推动万物智联创新。
更多推荐

 5
5 0
0- 0



 已为社区贡献3条内容
已为社区贡献3条内容

所有评论(0)