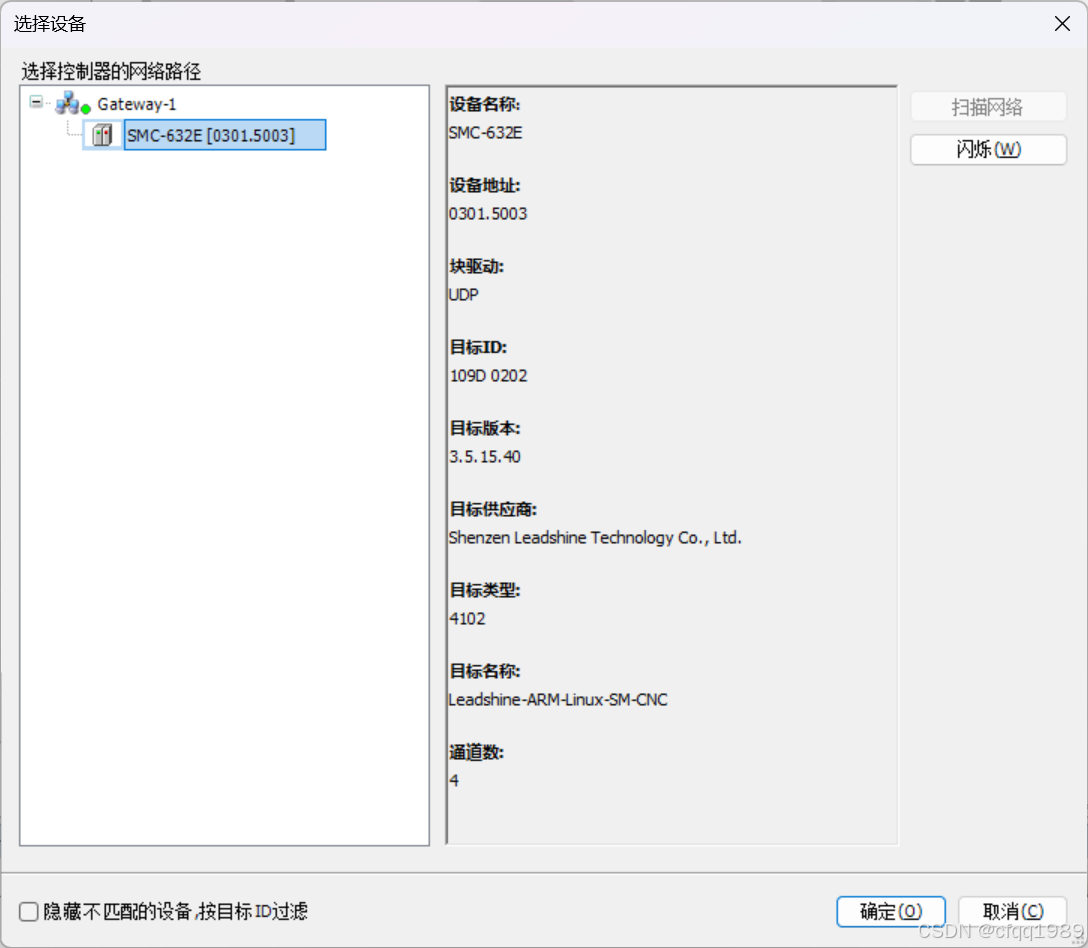
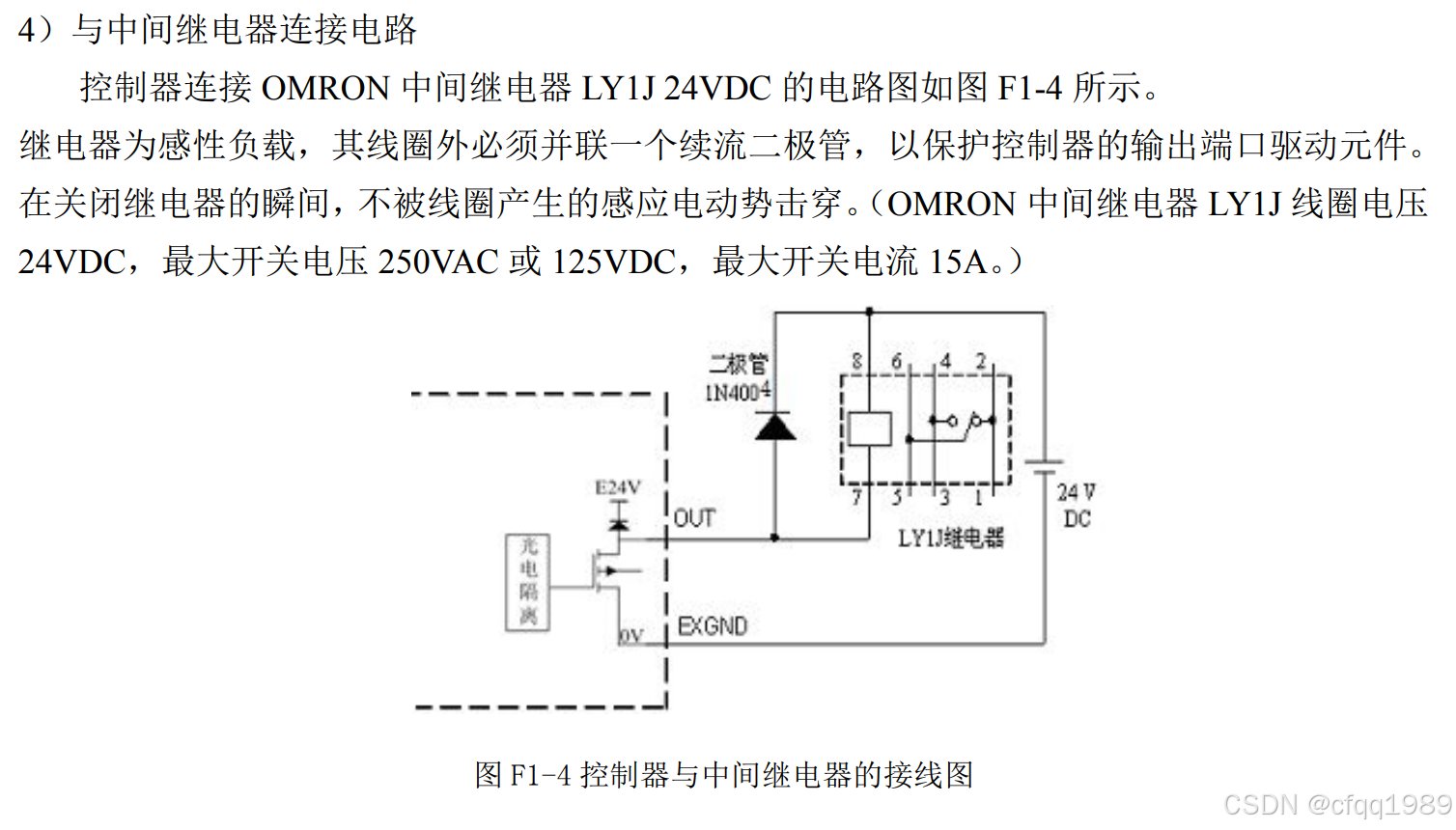
雷赛SMC632E
在 SMC632E 顶部拨码开关的旁边,有一个嵌入到控制器内部的复位按钮,是用来实现控 制器恢复出厂设置的按钮,通过该按钮可以清除控制器内部的程序、清除掉电保存变量、复位 至默认的 IP 地址。当控制器需要进行恢复出厂设置时,请按住复位按钮,然后给控制器上电,约 10 秒后控 制器蜂鸣器会连续响三声,此时可以松开此按钮,控制器执行复位操作,待三秒后控制器复位 完毕,继续执行后续操作。Etherne
设备:

IP: 192.168.1.3
Ethernet0 【eth1】以太网接口(千兆网口),默认 IP:192.168.1.3
Ethernet1 【eth3】以太网接口(百兆),默认 IP:192.168.5.11
Ethernet2 【eth2】以太网接口(百兆),默认 IP:192.168.11.11
EthernetCAT 【eth0】以太网接口(百兆),默认 IP:192.168.33.11
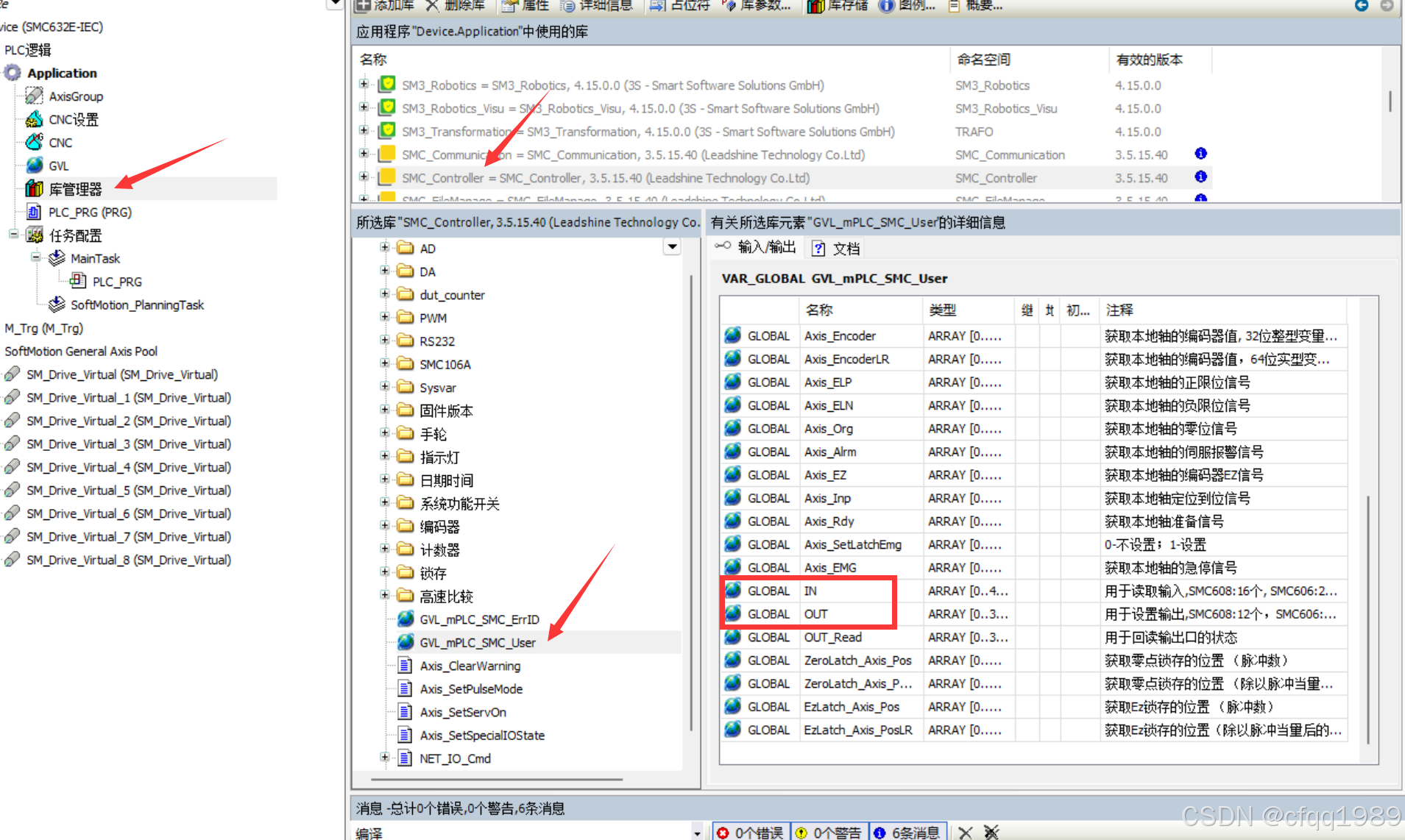
库: SMC_Controller 全局变量
GVL_mPLC_SMC_User(GVL)
IO:
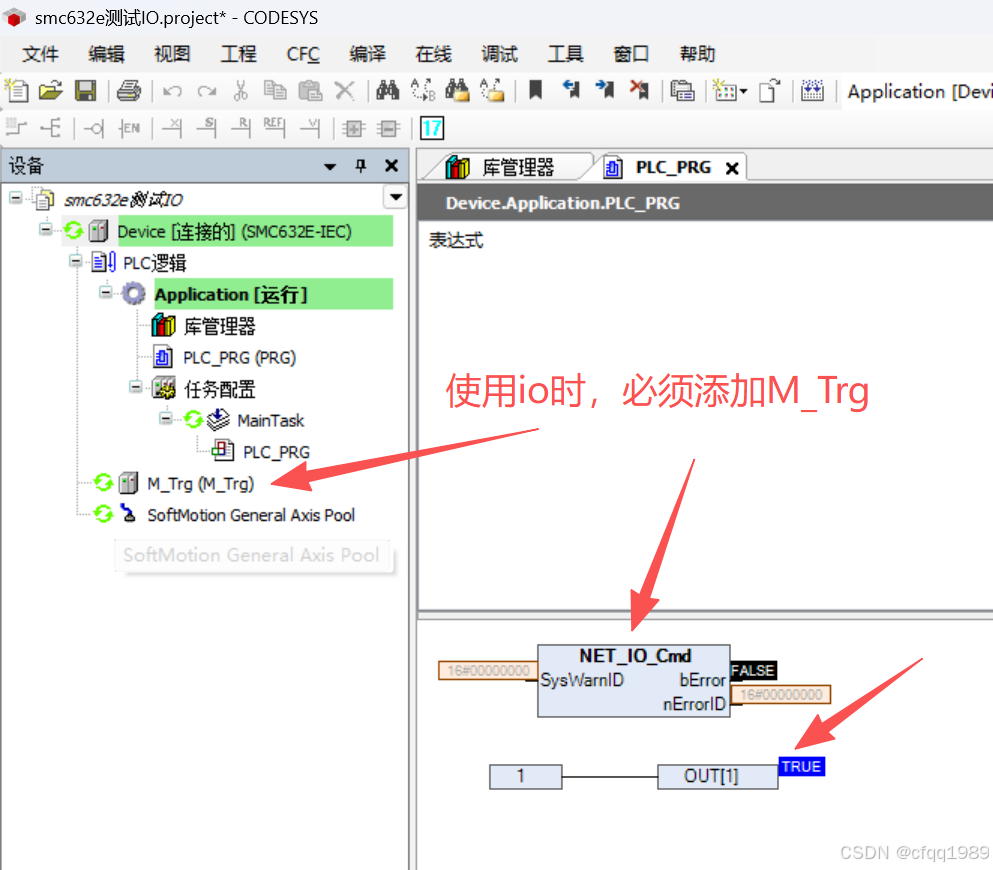
使用io必须满足以下条件:
1添加库 SMC_Controller
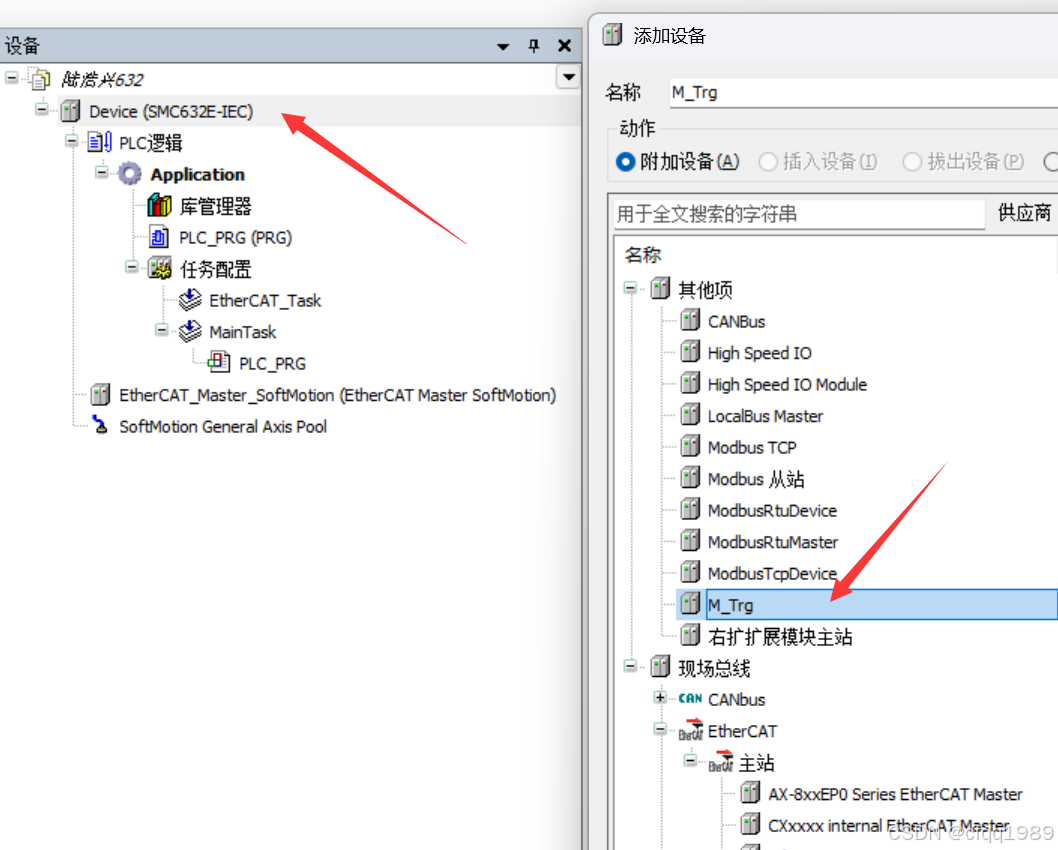
2设备添加 T_Mrg
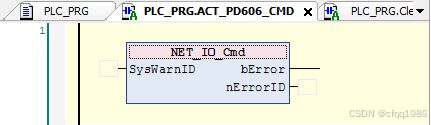
3添加FB块 NET_IO_Cmd // 用于刷新io状态
4设置 out[ ] 状态 //
GVL_mPLC_SMC_User全局变量内out是输出
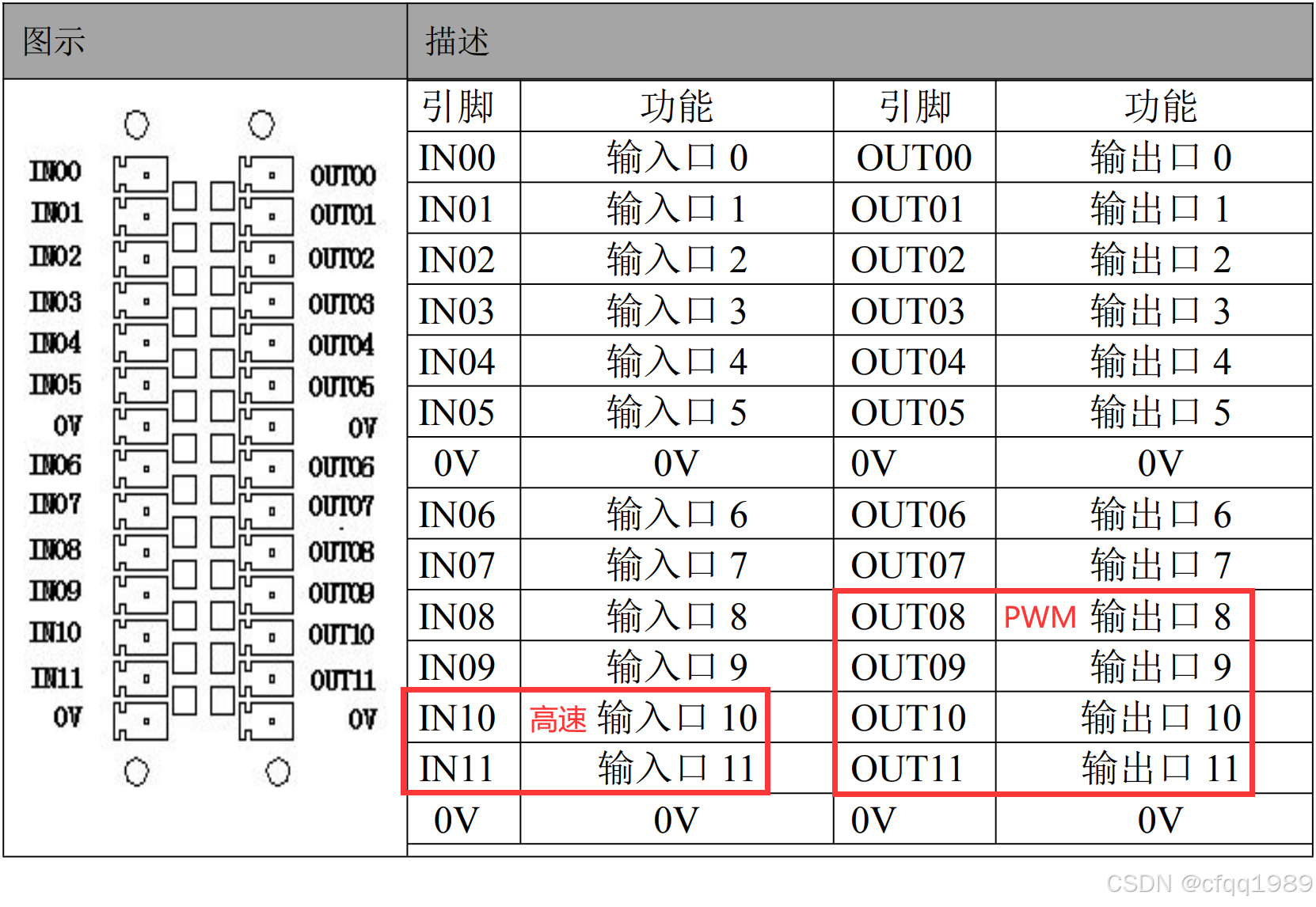
SMC632E 控制器本地输入全部为光电隔离,支持 24V 电平输入,12 路通用输入 IN0-IN11, 其中 2 路高速输入 IN10-IN11。
本地输出全部为光电隔离,12 路通用输出 OUT0-OUT11,其中4 路高速输出 OUT8-OUT11【脉冲频率500KHz】,支持 24V 负载。
默认情况高速输入是普通输入,通用输入输出都可以在 SMC_Controller 库中的全局变量 GVL_mPLC_M606_User 找到【
GVL_mPLC_SMC_User】。注意,程序中若涉及 IO 操作必须添加 SMC_Controller 库中的 NET_IO_Cmd 硬件 IO 处理模块,否则操作 IO 不会生效。
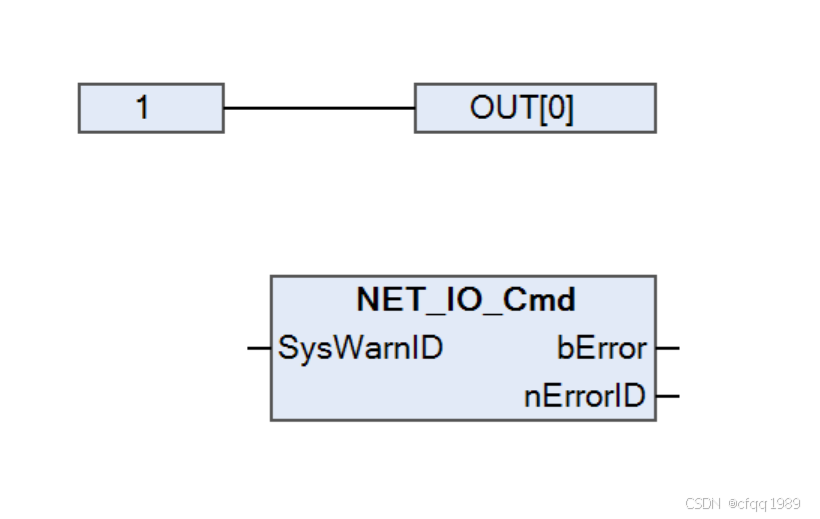
out【0】是DO0点位
NET_IO_Cmd 是为了刷新io的状态。
 全局变量直接用就行。用原版codesys,需要从雷赛软件内导出该库。【移植】
全局变量直接用就行。用原版codesys,需要从雷赛软件内导出该库。【移植】
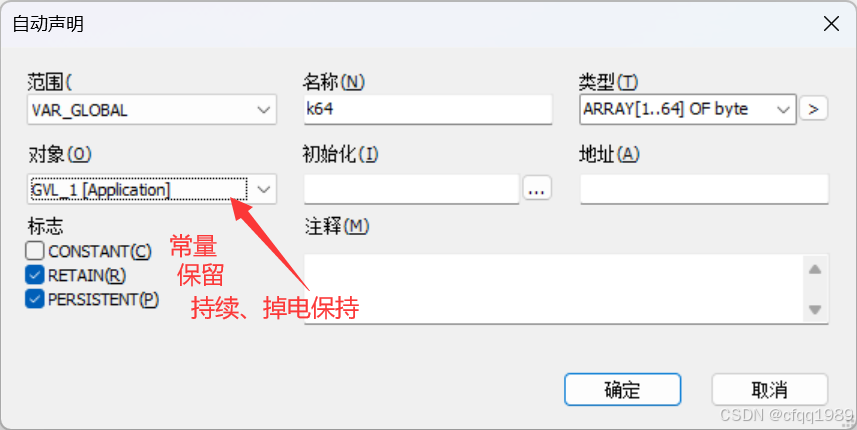
掉电保持64K:
shift + F2 唤出助手 【对象】创建
ARRAY[1..64] OF byte
手轮接口DB9:
设备必须添加 T_Mrg
接1200脉冲编码器,转一圈显示 ±4800【默认4倍频】
HandWheel_SetWorkMode 0是四倍频计数, 1是AB计数
当SetWorkMode = 1时,接1200脉冲编码器,转一圈显示±1200
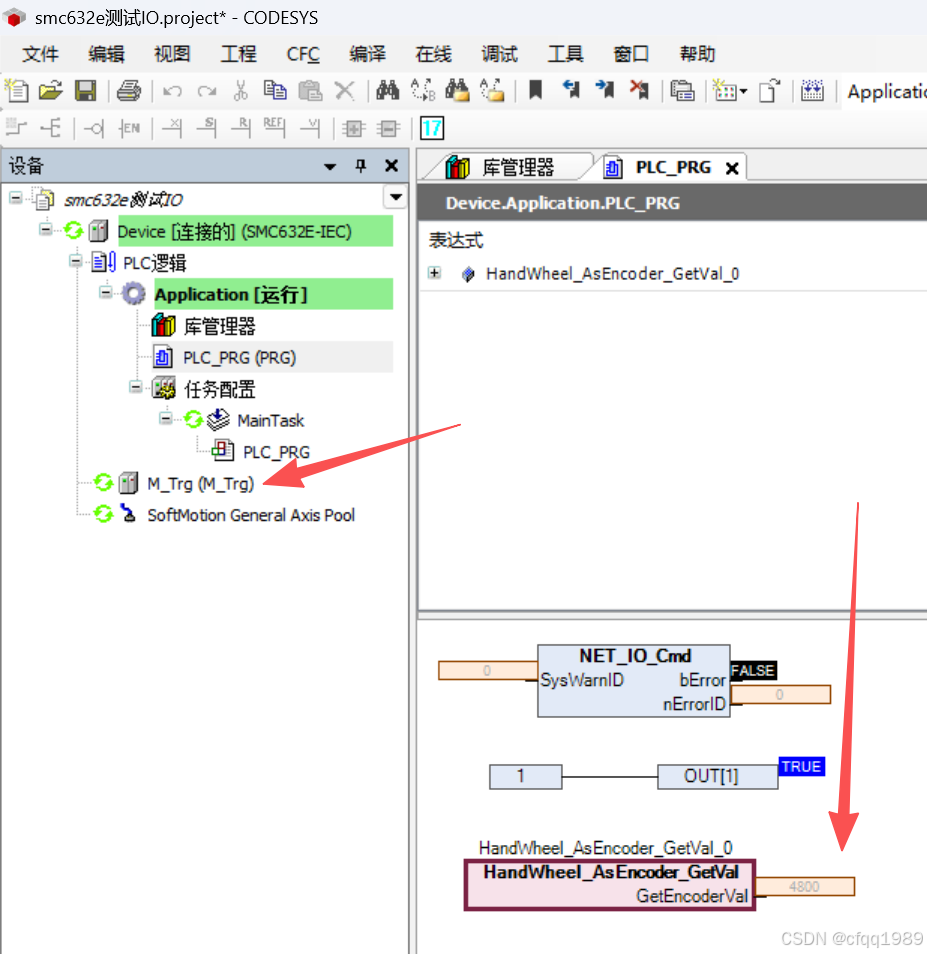
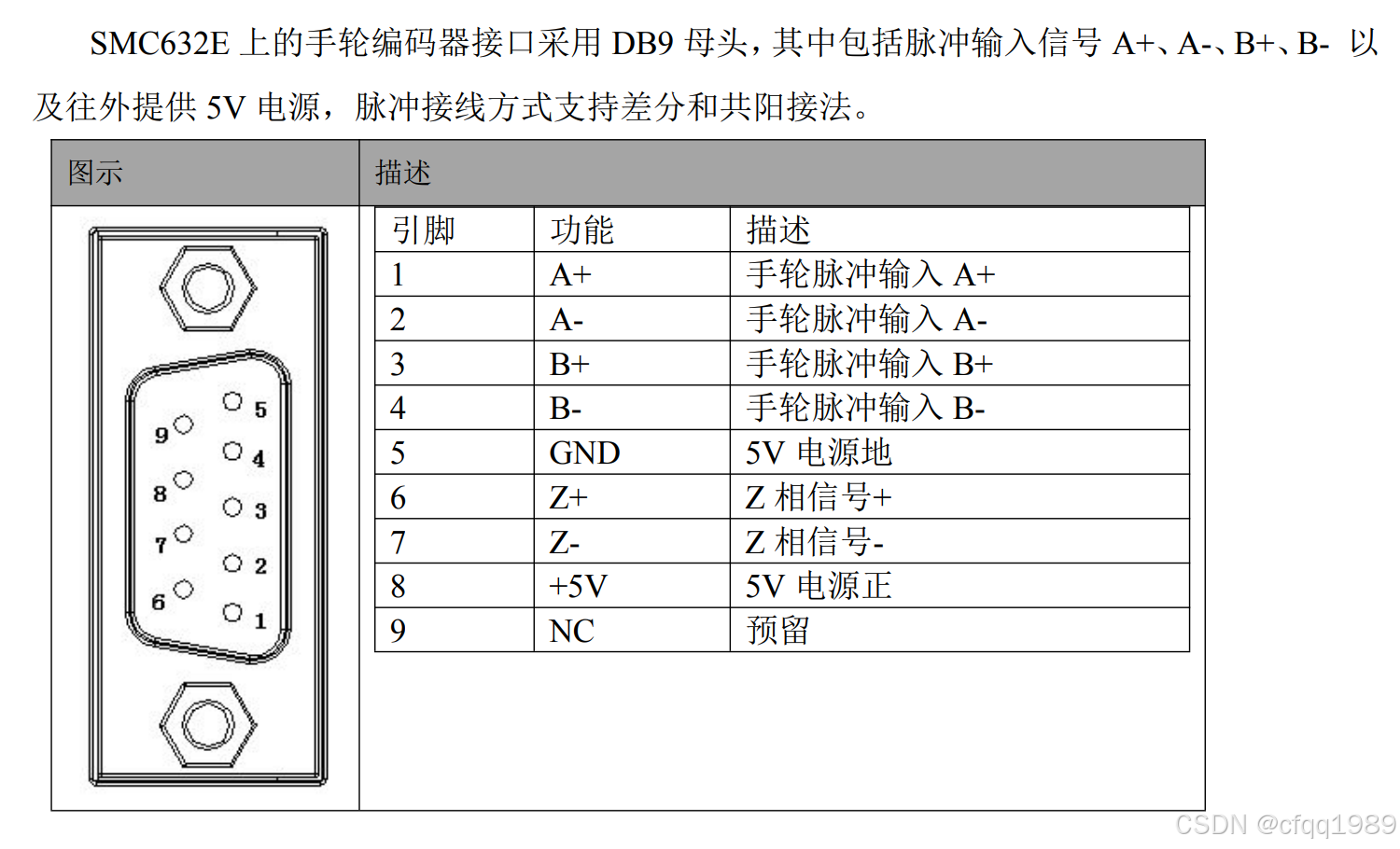
SMC632E 上的手轮编码器接口采用 DB9 母头,其中包括脉冲输入信号 A+、A-、B+、B- 以 及往外提供 5V 电源,脉冲接线方式支持差分和共阳接法。
HandWheel_AsEncoder_GetVal 手轮编码器值
HandWheel_AsEncoder_SetVal
---------------------------------------------
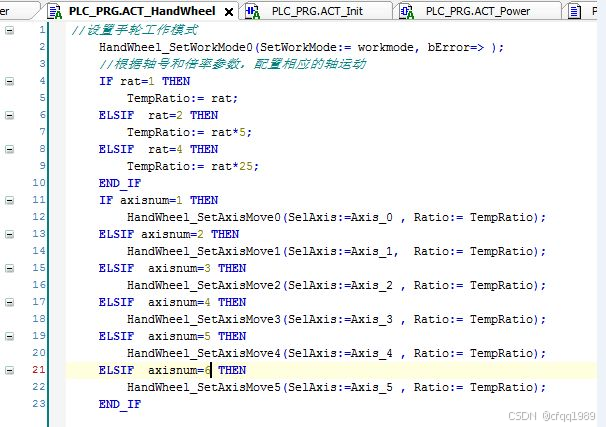
HandWheel_SetWorkMode 手轮工作模式:0 四倍频计数(AB 相),1 AB计数
HandWheel_SetAxisMove 单轴运动:手轮--->到轴的运动
HandWheel_SetAxisMove1 单轴运动:手轮--->到轴的运动【带方向】倍率值(0.001<=10000)
RS485:md9母
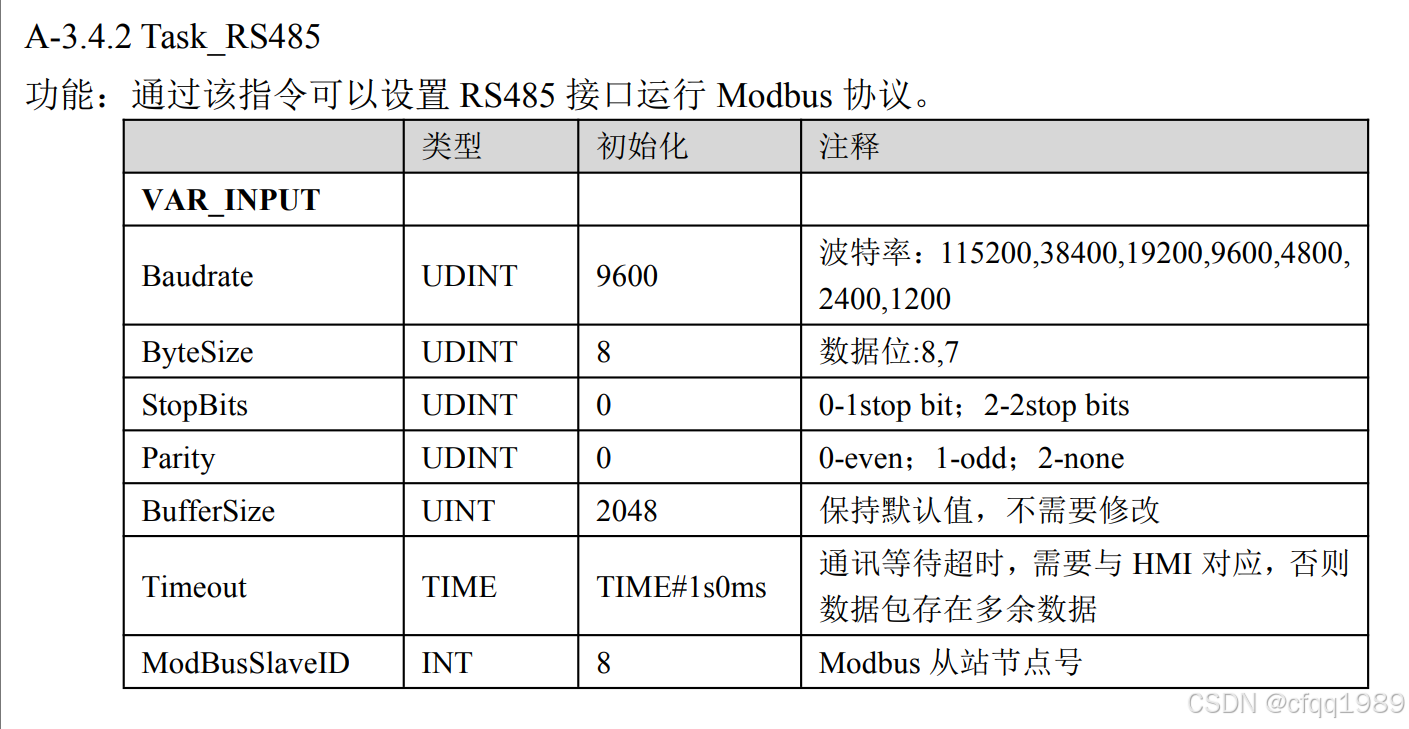
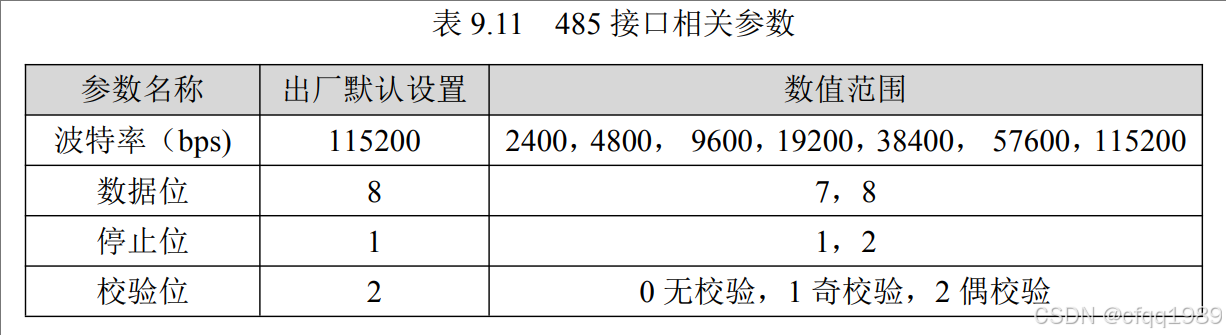
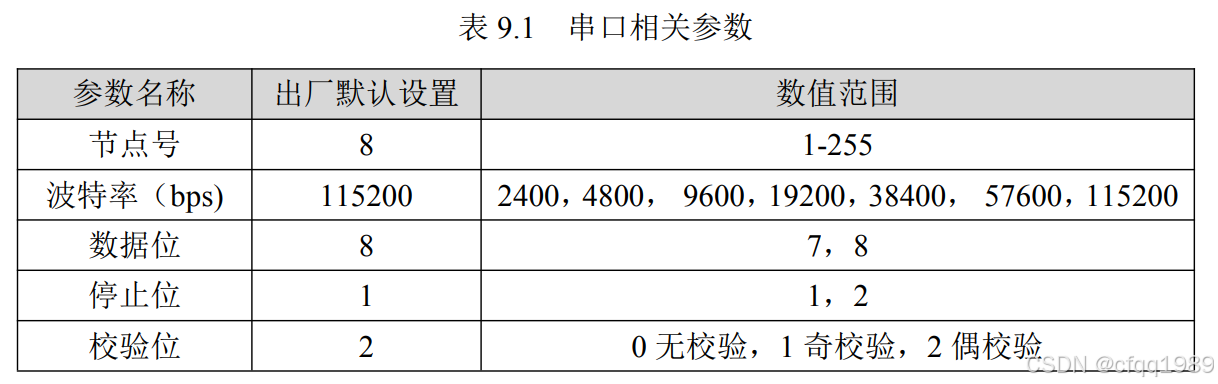
默认站号8,【9600,8,N,1】
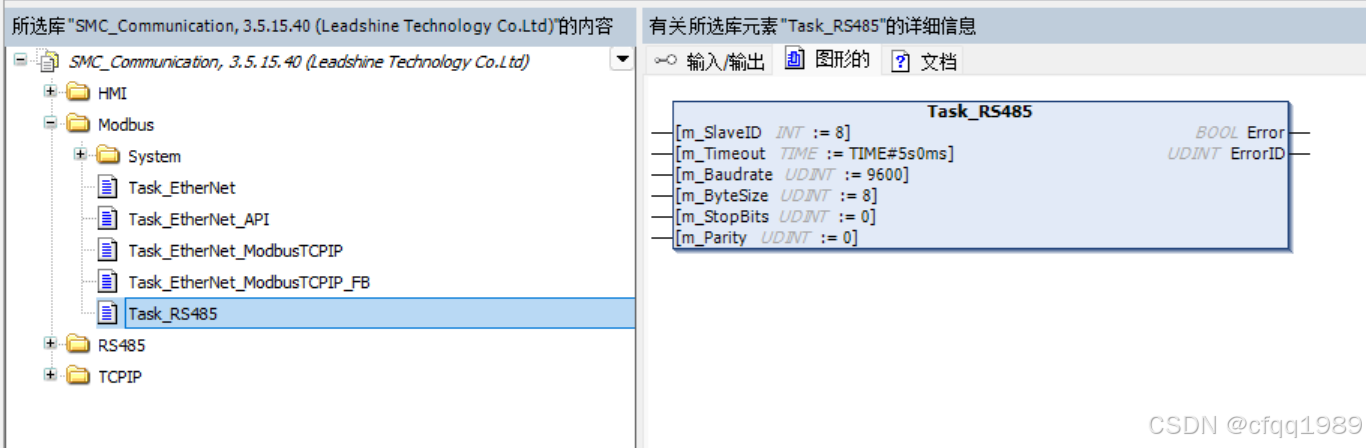
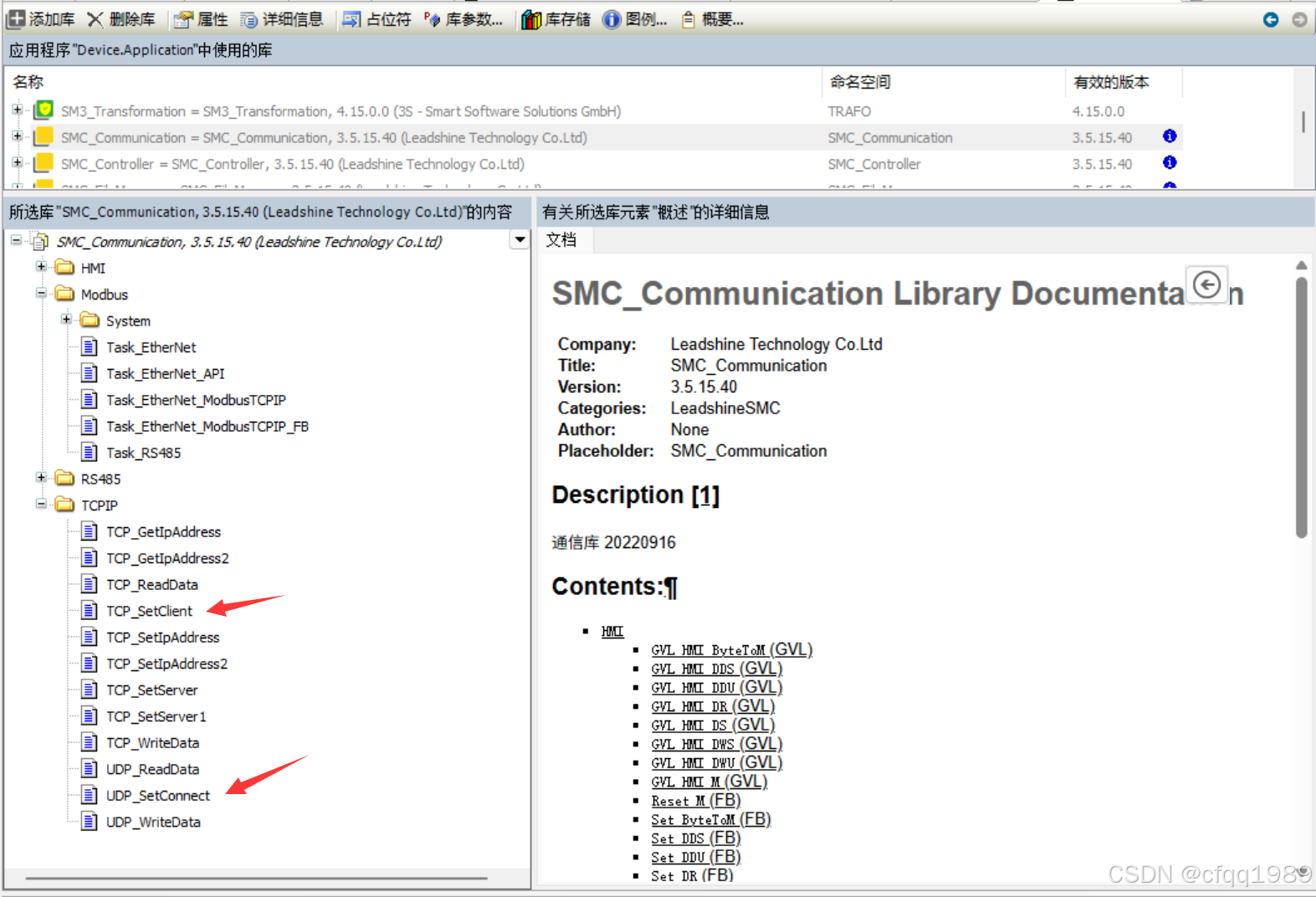
该功能块由 库文件“SMC_Communication”提供
Modbus RTU 协议通讯:Task_RS485 【程序中要调用】
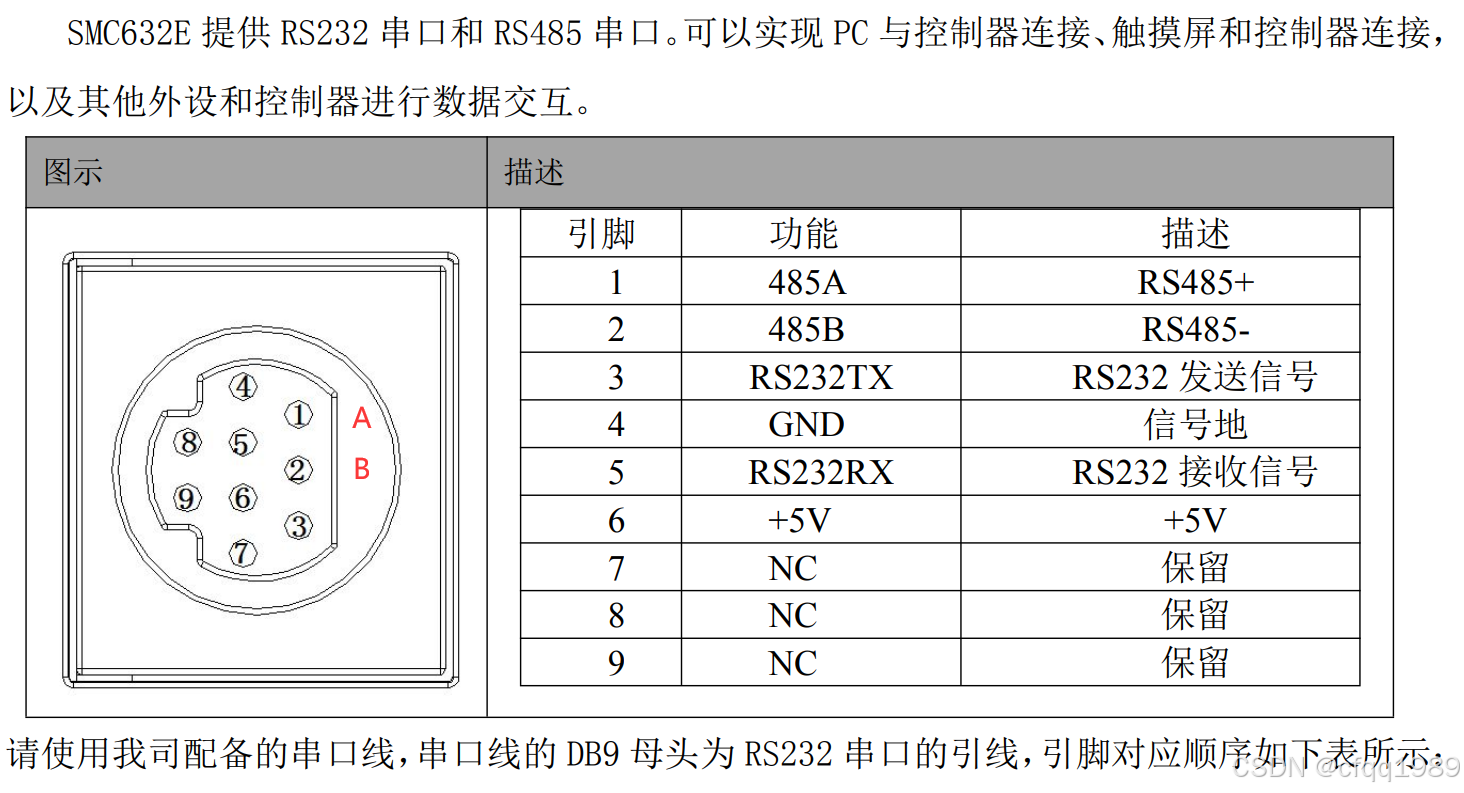
MD9母座
SMC632E 控制器的 RS485 串口支持 MODBUS RTU 协议,可以和任何支持标准 MODBUS RTU 协议的外设进行数据交互。控制器作为协议的从站,站号固定为 8。
RS485_Open 配置 485 接口参数并打开 485 端口
RS485_Write 485 端口发送数据
RS485_Read 485 端口读取数据
RS485_Close 关闭 485 端口
Task_RS485 设置 485 通讯端口参数,并处理 Modbus RTU 协议
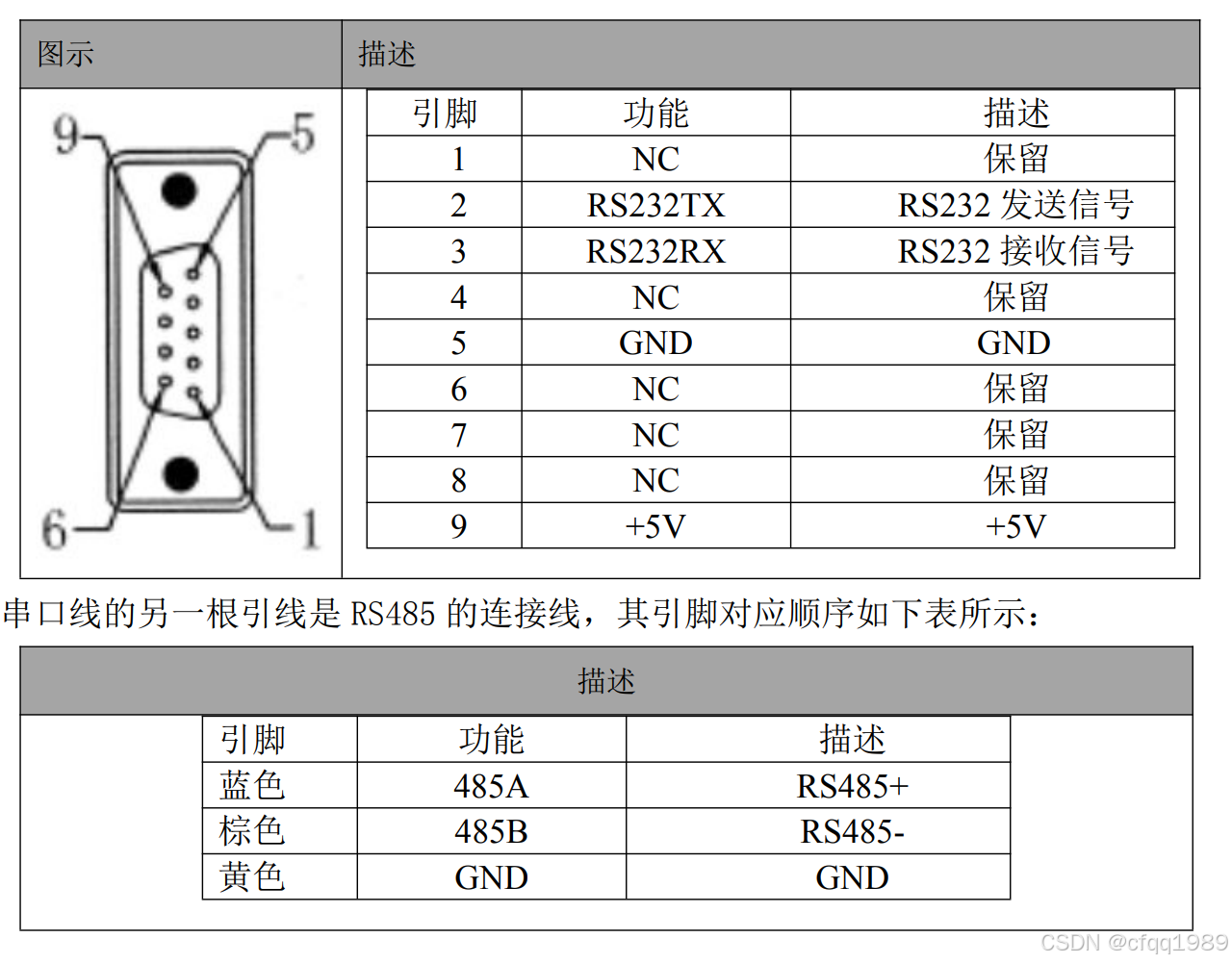
RS232
默认 站号为 8,【115200、8,偶e,1】
用
RS232_Set 来修改参数,该设置指令上升沿有效,设置完成后立即生效。
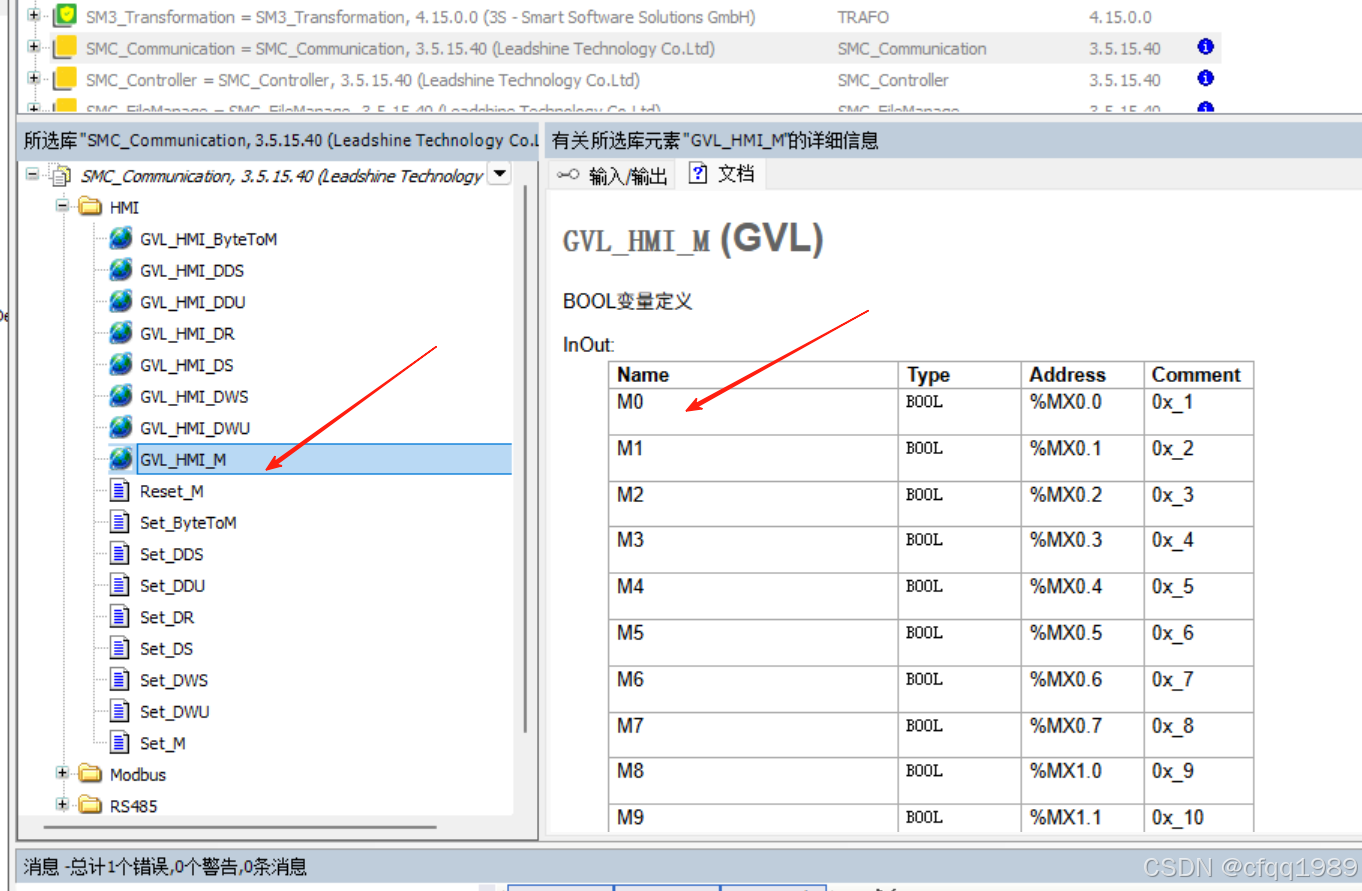
该功能块由库文件“SMC_Communication”提供,程序中用到 HMI 功能的时候需要在程序添加该库文件
Set_M,Reset_M,Set_ByteToM,Set_DWS,Set_DWU,Set_DDS,Set_DDU,
Set_DR,Set_DS
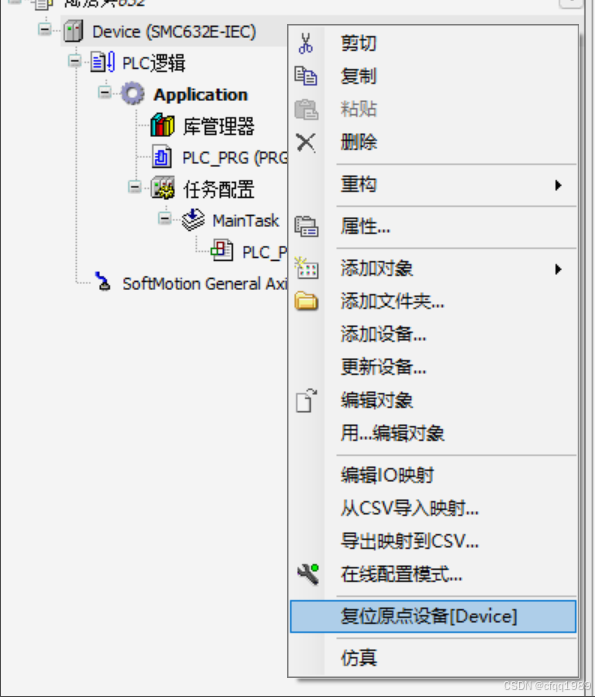
恢复出厂:
在 SMC632E 顶部拨码开关的旁边,有一个嵌入到控制器内部的复位按钮,是用来实现控 制器恢复出厂设置的按钮,通过该按钮可以清除控制器内部的程序、清除掉电保存变量、复位 至默认的 IP 地址。 当控制器需要进行恢复出厂设置时,请按住复位按钮,然后给控制器上电,约 10 秒后控 制器蜂鸣器会连续响三声,此时可以松开此按钮,控制器执行复位操作,待三秒后控制器复位 完毕,继续执行后续操作。
ECAT总线:
CODESYS SoftMotion 4.6.3.0.package
eth0 网口3,ECAT
eth1 网口0【千兆】192.168.1.3
eth2 网口2
eth3 网口1
添加 M_Trg 用于本体io控制
总线周期时间(Cycle Time):支持 250us、500us、1ms、2ms、4ms 总线周期 (根据总线控制器所带的负载而定),用户根据连接从站数量的多少选择合适的总线周期;
同步偏移(Sync Offset):该值配置范围为 1~50,采用默认设置(默认值为 1)。该参数 推荐值为 1 和 20。
IoDrvEtherCAT 总线操作【复位 / 停止】
ETCSlave_Diag 从站伺服【复位】
SMC3_ETC_ReadParameter_CoE SDO 读服务
SMC3_ETC_WriteParameter_CoE SDO 写服务
X.bSWLimitEnable 软限位使能
X.fSWLimitDeceleration 软限位减速度
X.fSWLimitNegative 软限位负极限
X.fSWLimitPositive 软限位正极限
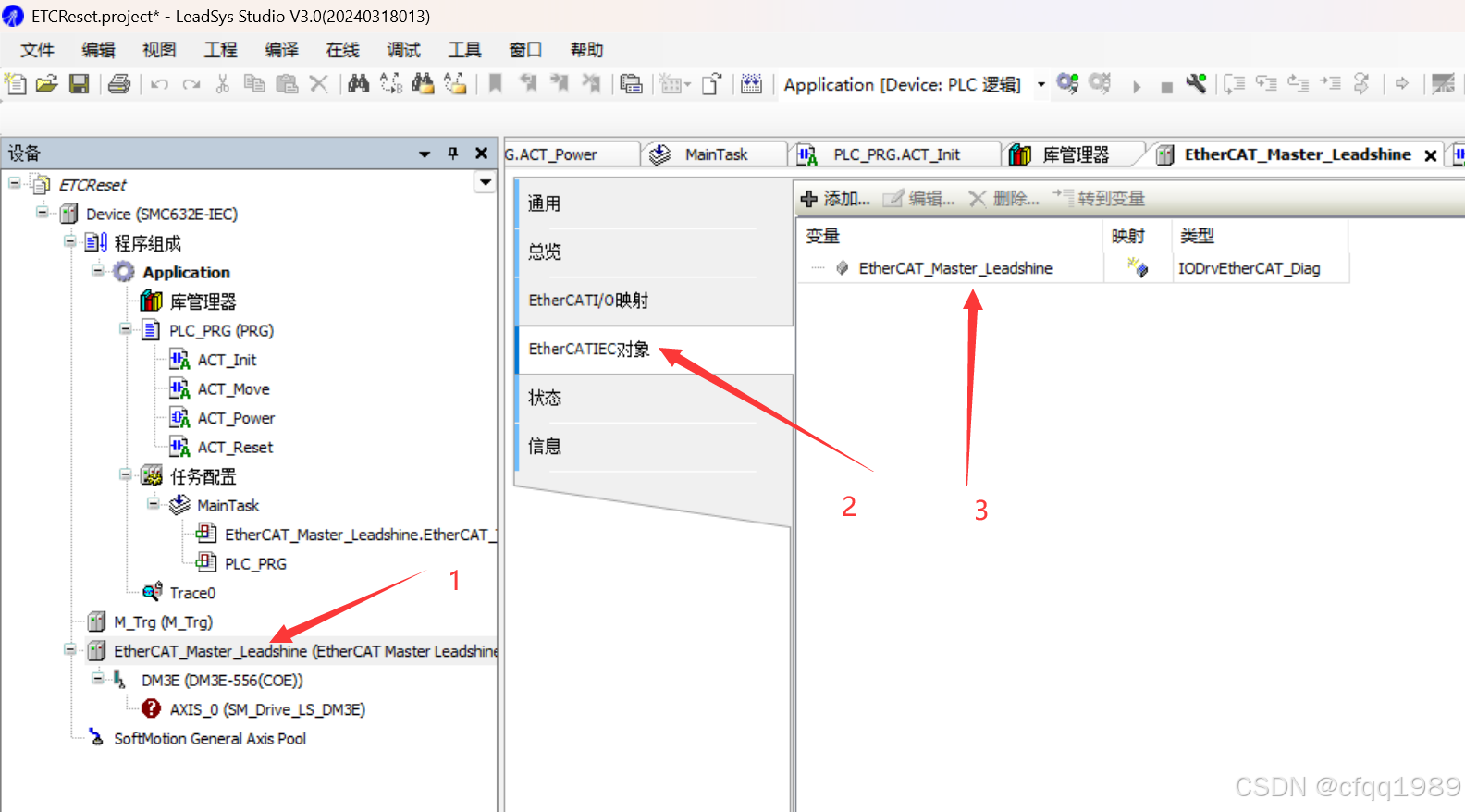
//拔掉EtherCAT从站的网线,让总线报错
CASE istate OF
1://复位总线
EtherCAT_Master_Leadshine.xRestart := TRUE;
istate := 2;
2://延时,等待总线复位完成
iDelay:=iDelay+1;
IF iDelay>1000 THEN
iState:=3;
iDelay:=0;
END_IF
3:
EtherCAT_Master_Leadshine.xRestart := FALSE;
istate := 5;
END_CASEEtherCAT_Master_Leadshine();
ACT_Init();
ACT_Move();
ACT_Power();
ACT_Reset();
性能:
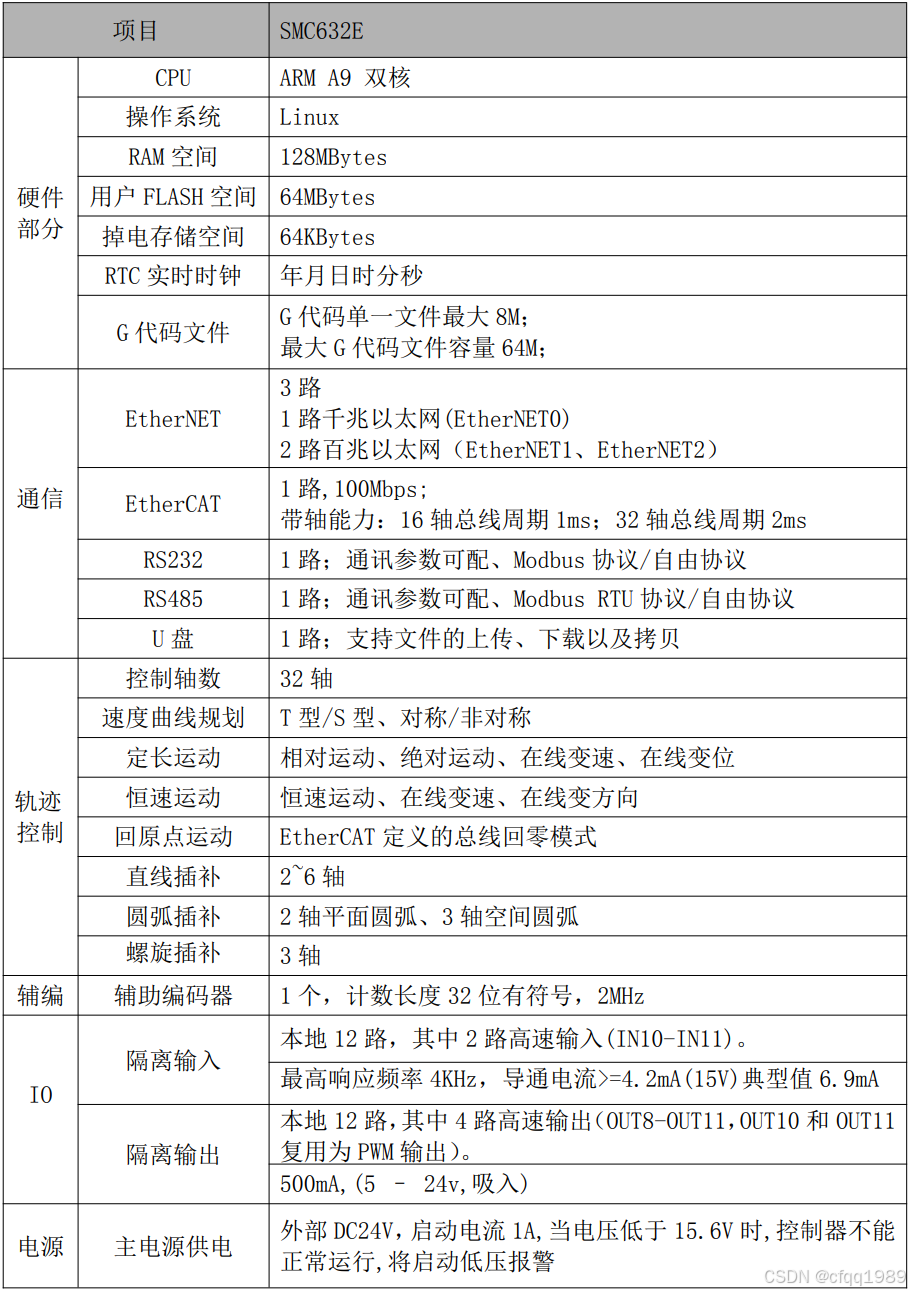
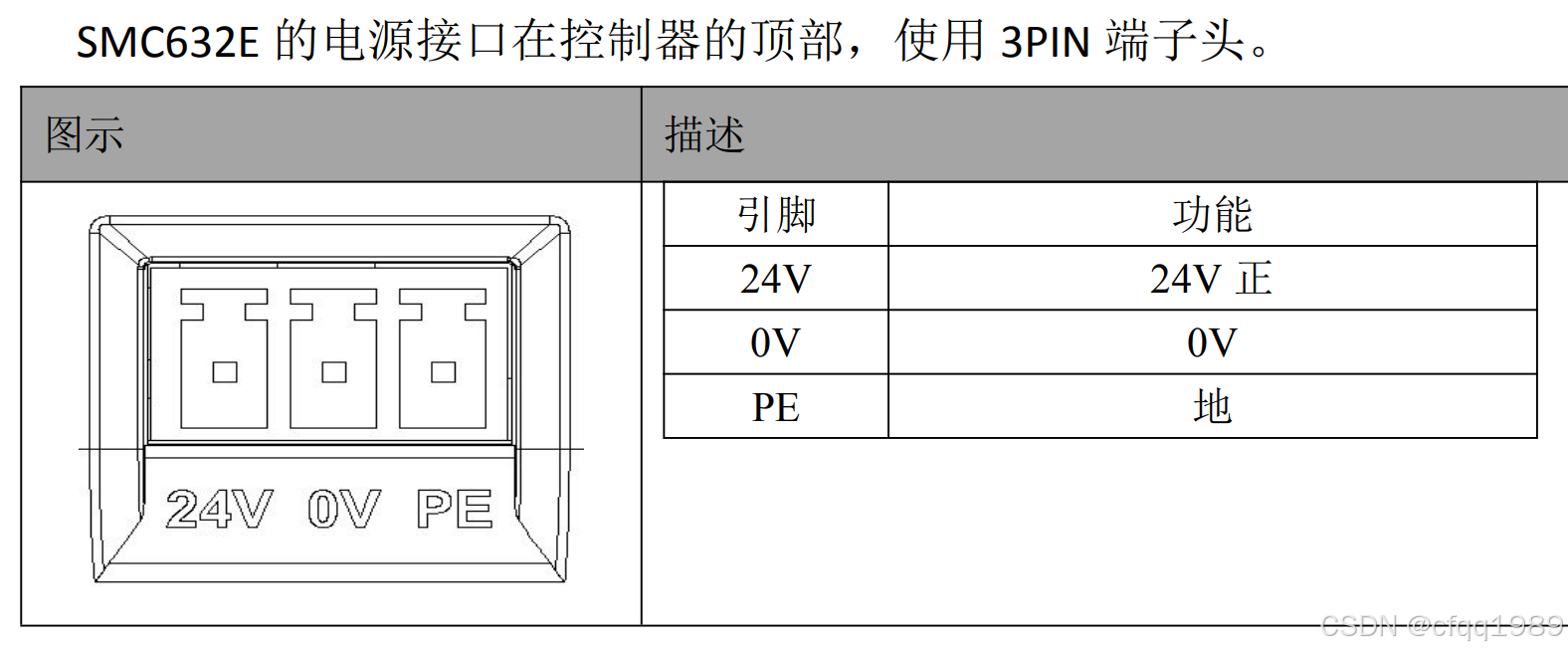
电源:
高速io输入:
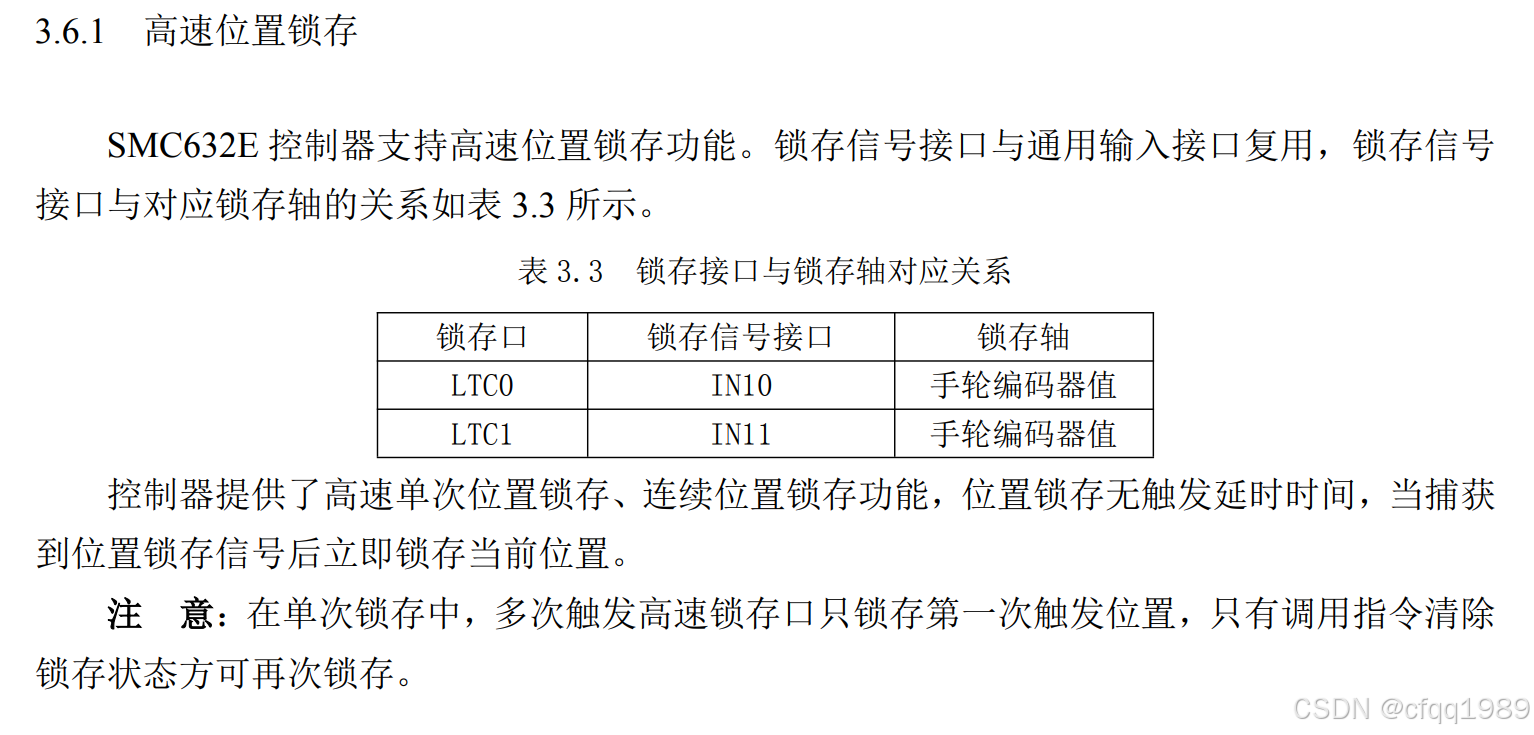
HighSpeedLatch_SetPara 设置高速锁存参数
HighSpeedLatch_GetState 读取高速锁存状态
HighSpeedLatch_Axis_Pos 获取高速锁存的位置
锁存的位置保存于 SMC_Controller 库中 GVL_mPC_M606_User 全局变量列表的 HighSpeedLatch_Axis_Pos 数组 中 , 如 HighSpeedLatch_Axis_Pos[0] 表 示 通 道 0 ( In10 为 通 道 0 ) 的 高 速 锁 存 值 , HighSpeedLatch_Axis_Pos[1]表示通道 1(In11 为通道 1)的高速锁存值。
高速io输出:
CMP0--------- OUT10
CMP1--------- OUT11
电路使用的光耦频率可达 200KHz。每个 CMP 输出端口只能与手轮(手轮可以当编码器使用) 关联。支持“等于”、“小于”、“大于”比较模式为单次比较模式。“队列”模式提供 127 个比较点,采用先添加先比较,比较完可追加比较点,也可一次性添加多个比较点。“线性”模式适 用于每个比较点位置都是按照线性增量依次增加的情况,用户只需要设置起始比较点位置以及 线性增量值即可,非常方便。位置间时间间隔最小可达几微秒。
注 意: (1)每个比较器的位置比较都是独立进行的。
(2)在队列及线性比较模式中,执行位置比较时,每个比较点的触发是按照添加的比较 点顺序执行的,即如果有一个比较点没有被触发比较动作,那么后面的比较点是不会被触 发的。
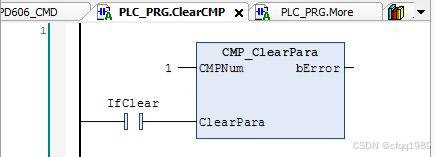
CMP_ClearPara 清除比较器的参数,清除掉所有状 态值,包括比较位置,FIFO 数据等
CMP_GetCurState 获取比较器当前状态
CMP_GetLinearPara 获取 Linear 模式下参数
CMP_GetWorkPara 获取比较器的参数
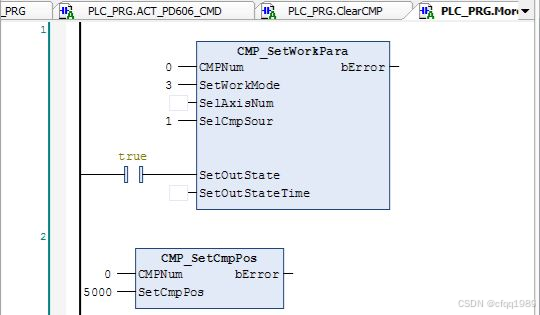
CMP_SetCmpPos 设置/更新比较器比较位置,在线性 模式下,更新起始比较位置;
CMP_SetFIFOPos 设置 FIFO 模式下比较位置,用于在 FIFO模式下,同时写入多个位置点, 最多可以输入 128 个比较点;
CMP_SetLinearPara 设置 Linear 模式下参数
CMP_SetWorkPara 设置比较器,有 6 种工作模式:0-不工作;1-值等于比较; 2-值小于比较;3-值大于比较器;4-FIFO 模式;5-Linear 模式【线性比较】。
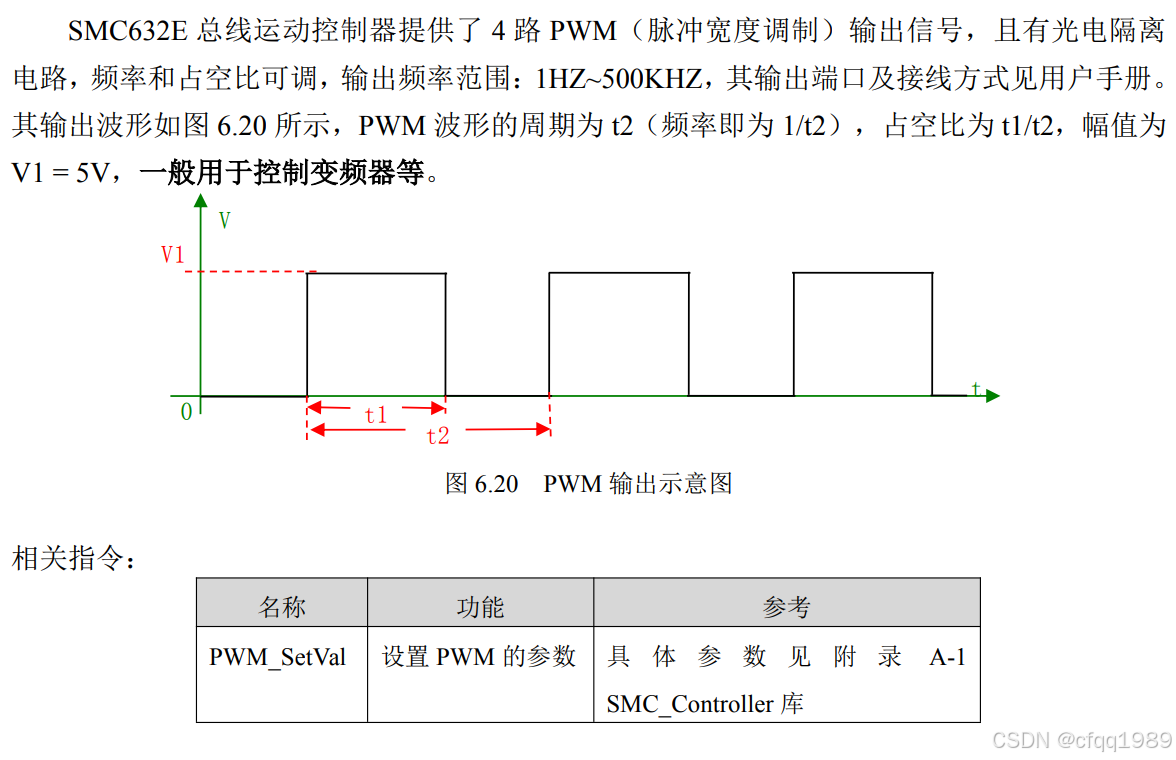
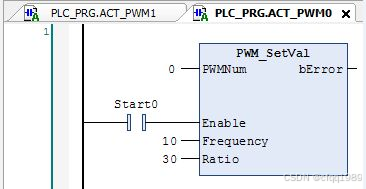
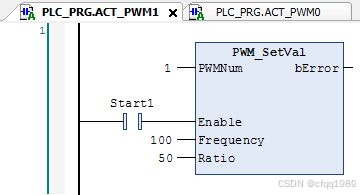
PWM:
PWM_SetVal参数1【多少Hz】参数2【占空比%】
文件操作:
SMC632E 运动控制器支持内部文件操作、U 盘文件传输、用户参数配置文件传输,方便用 户更好地实现上传下载文件功能。控制器内部提供 UsrData 和 UsrConfig 两个文件夹,一般情 况下建议用户将系统类的参数文件存储在“UsrConfig”文件夹内,工艺类的文件存储在“UsrData” 内。能够对文件进行写入、读取、拷贝、重命名、删除、获取文件信息等操作。
时间:
Get_DateAndTime 获取控制器系统时间 具体参数见附录 A-1.2.11 系统时 间库 Get_DateAndTime_1 获取控制器系统时间
Set_DateAndTime 设置控制器系统时间
Set_DateAndTime_1 设置控制器系统时间
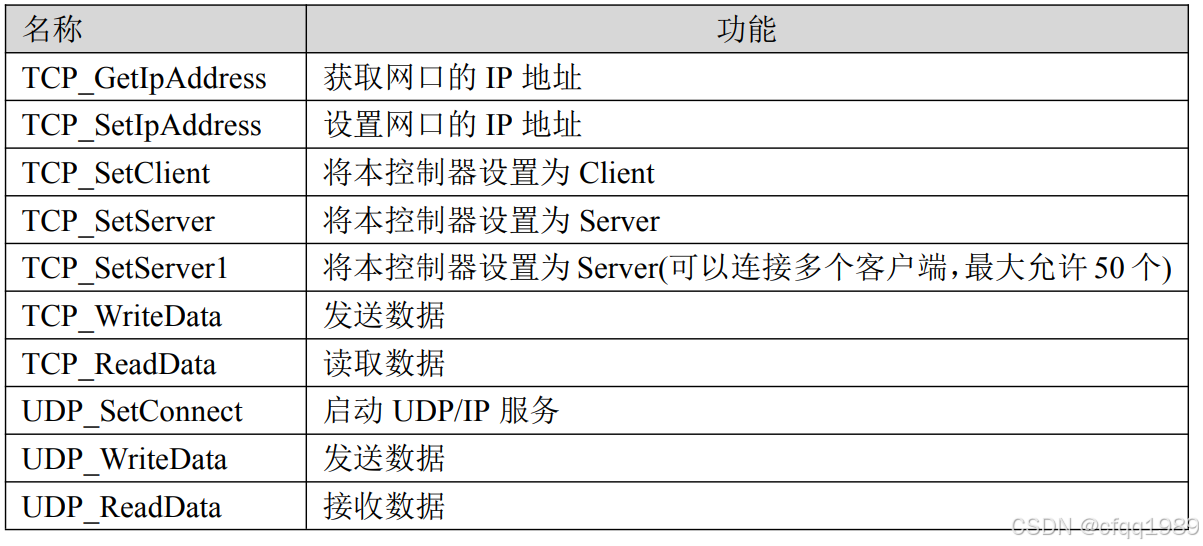
TCP:
modbusTCP:
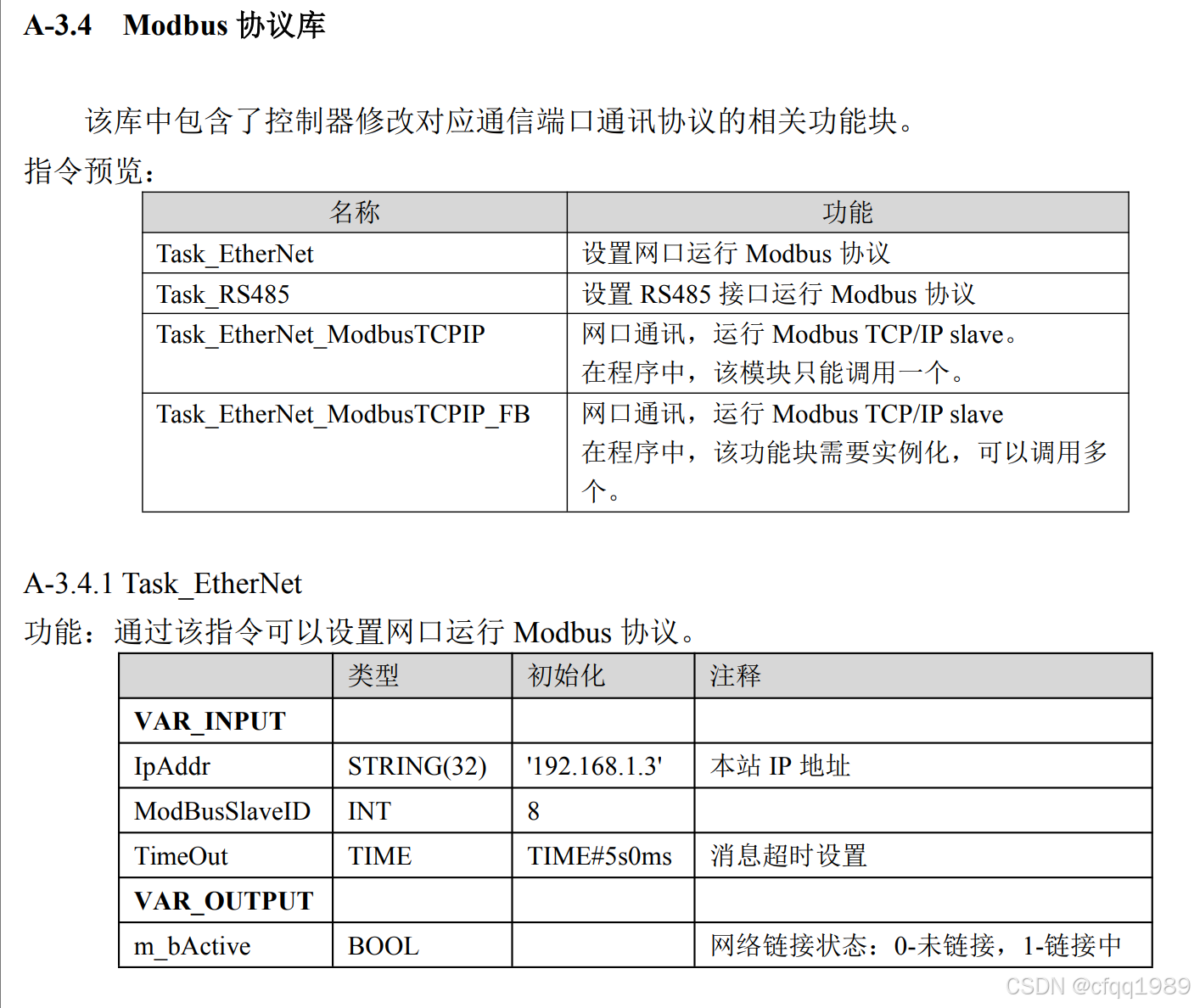
Task_EtherNet_ModbusTCPIP 在程序中,该 模块只能调用一个。
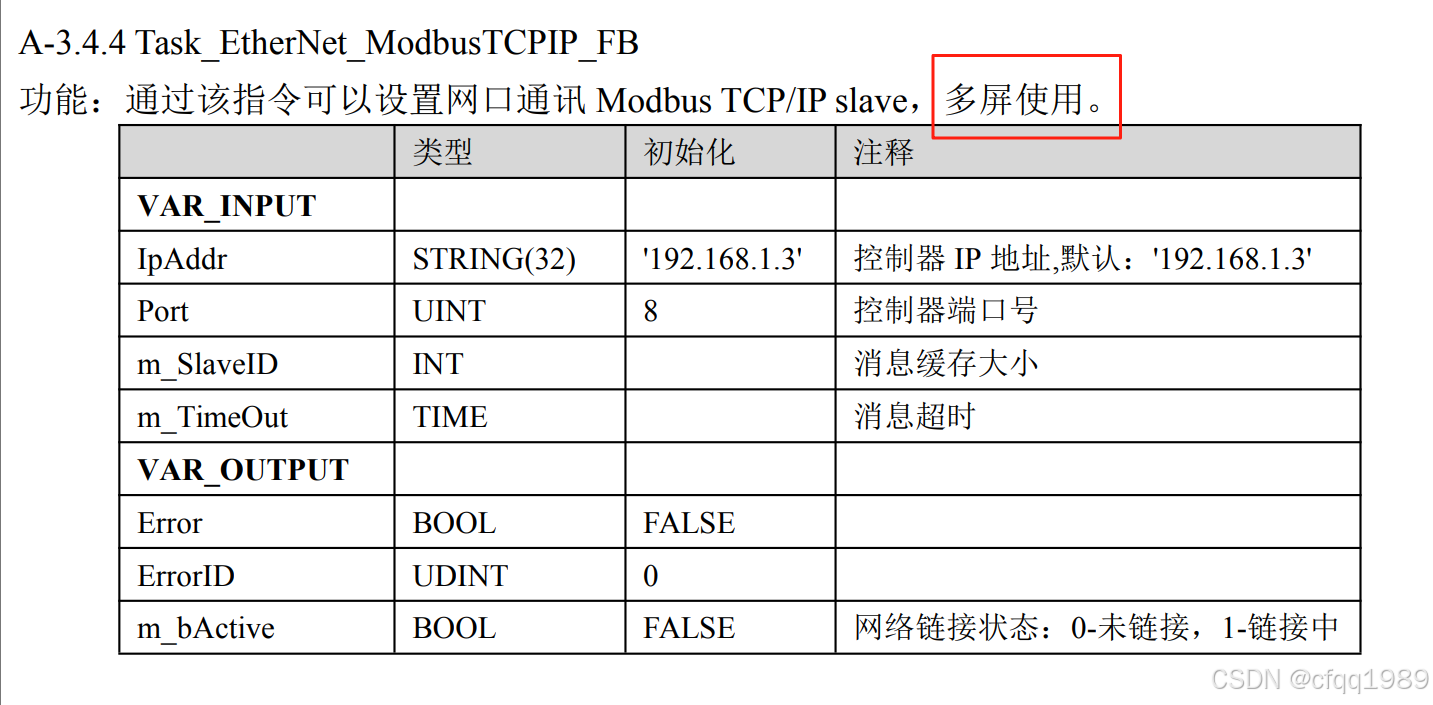
Task_EtherNet_ModbusTCPIP_FB 在程序中,该 功能块需要实例化,可以调 用多个。
TCP_SetClient 连接
TCP_SetServer1设置服务器
TCP_ReadData 读数据
TCP_WriteData 写数据
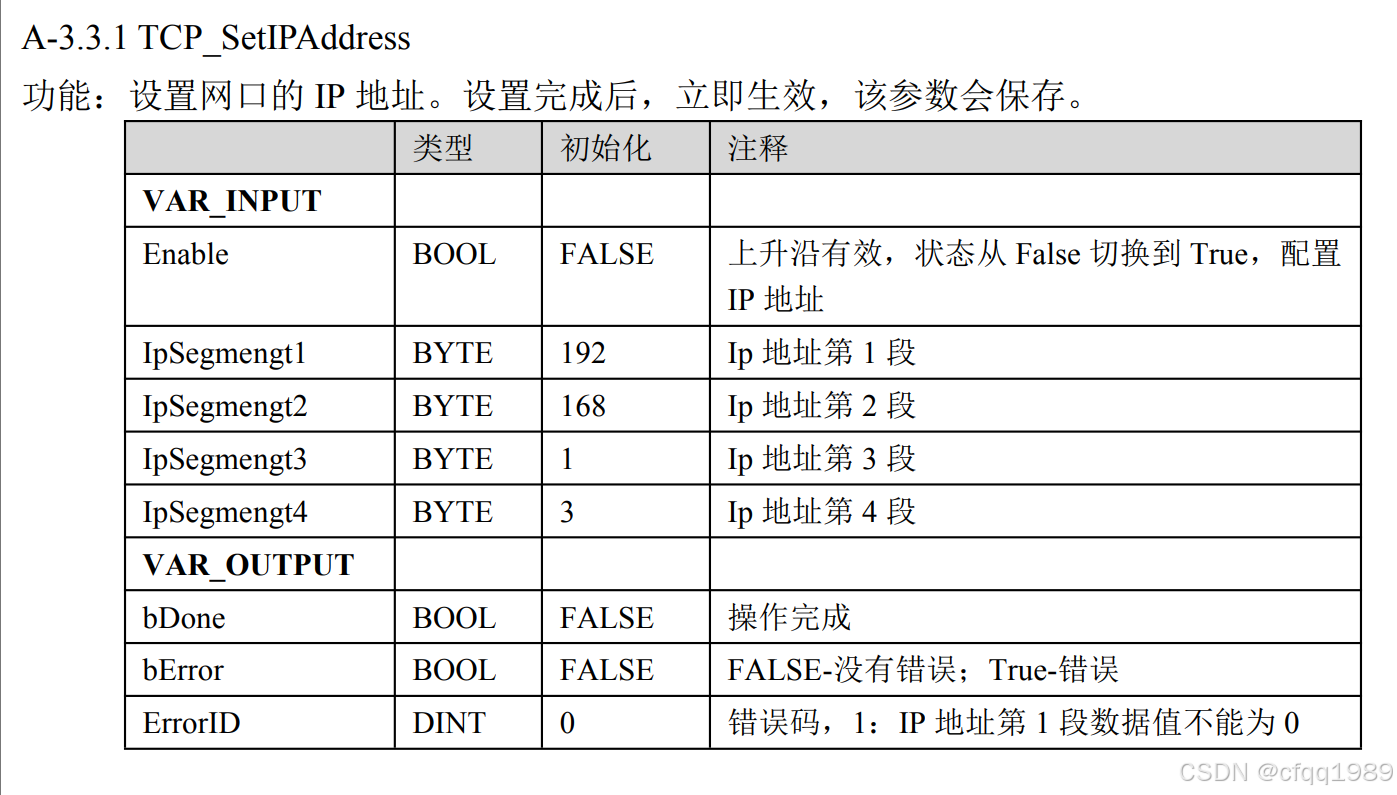
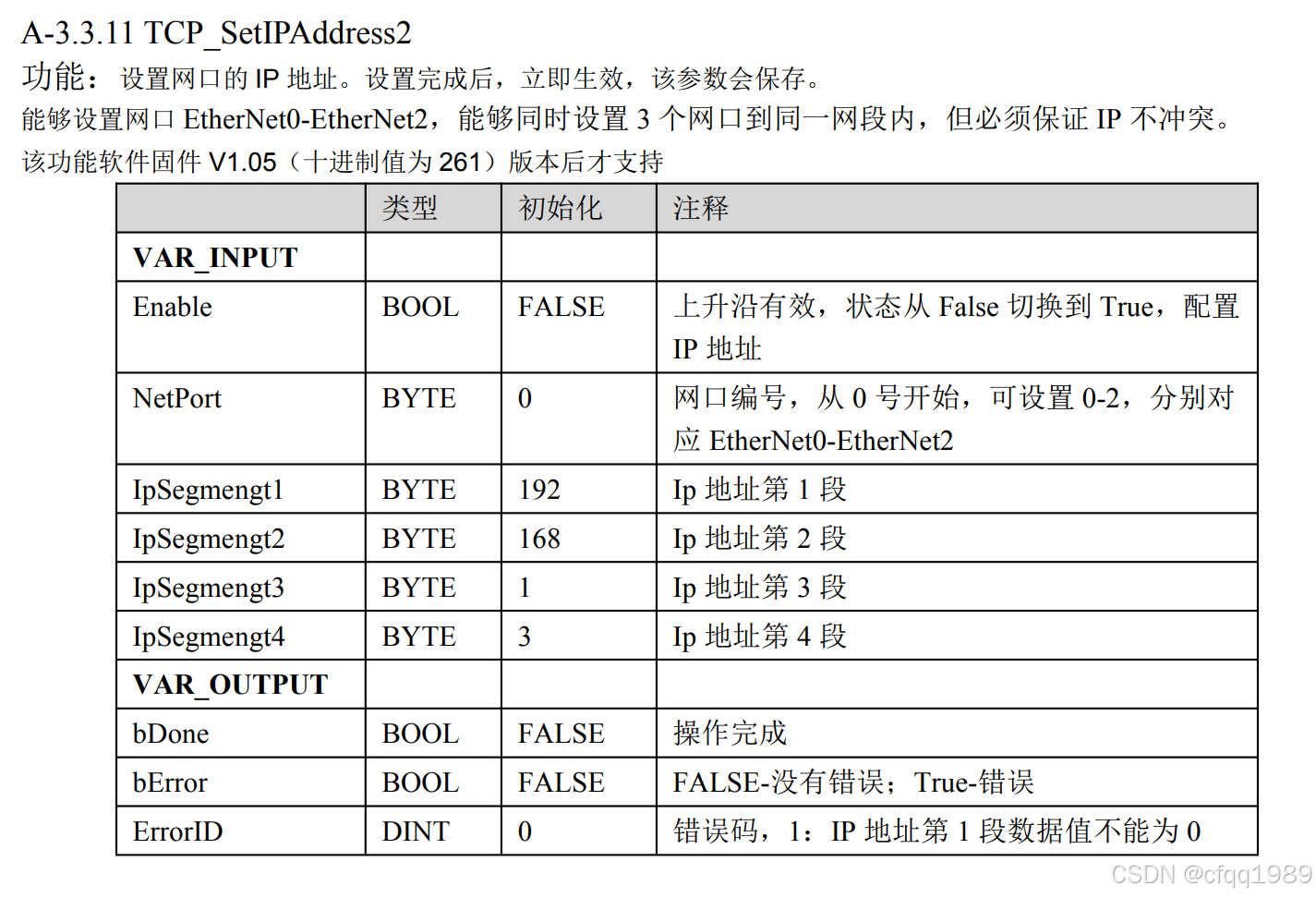
修改IP
补充
《雷赛 SMC IEC Studio 基础指令手册》
《雷赛 SMC IEC Studio 使用手册》
《雷赛 xxx 系列运动控制器(IEC 版)编程手册》
《雷赛 xxx 系列运动控制器(IEC 版)用户使用手册》
《雷赛 xxx 系列运动控制器(IEC 版)运动指令手册》
《雷赛 IEC 系列控制器入门指引实操手册》

开源鸿蒙跨平台开发社区汇聚开发者与厂商,共建“一次开发,多端部署”的开源生态,致力于降低跨端开发门槛,推动万物智联创新。
更多推荐

 7
7 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)