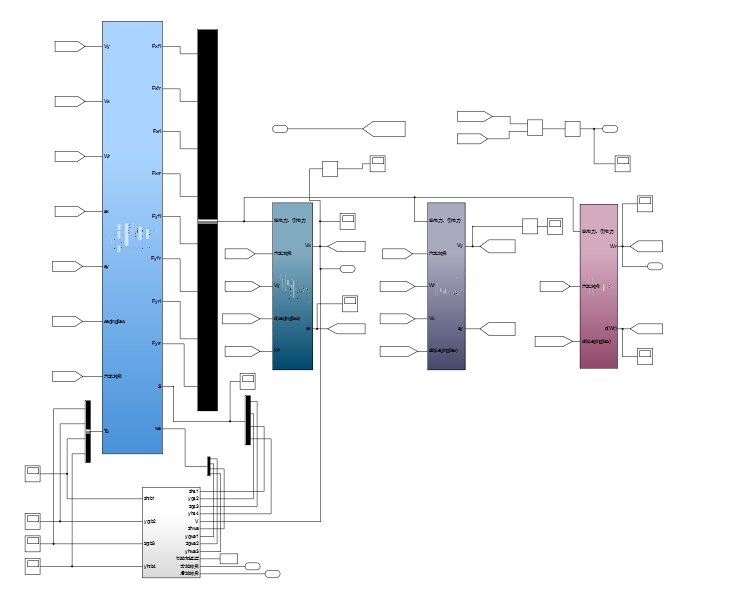
MATLAB/SIMULINK搭建分布式驱动电动汽车模型,七自由度整车模型,包括横摆,纵向,侧向
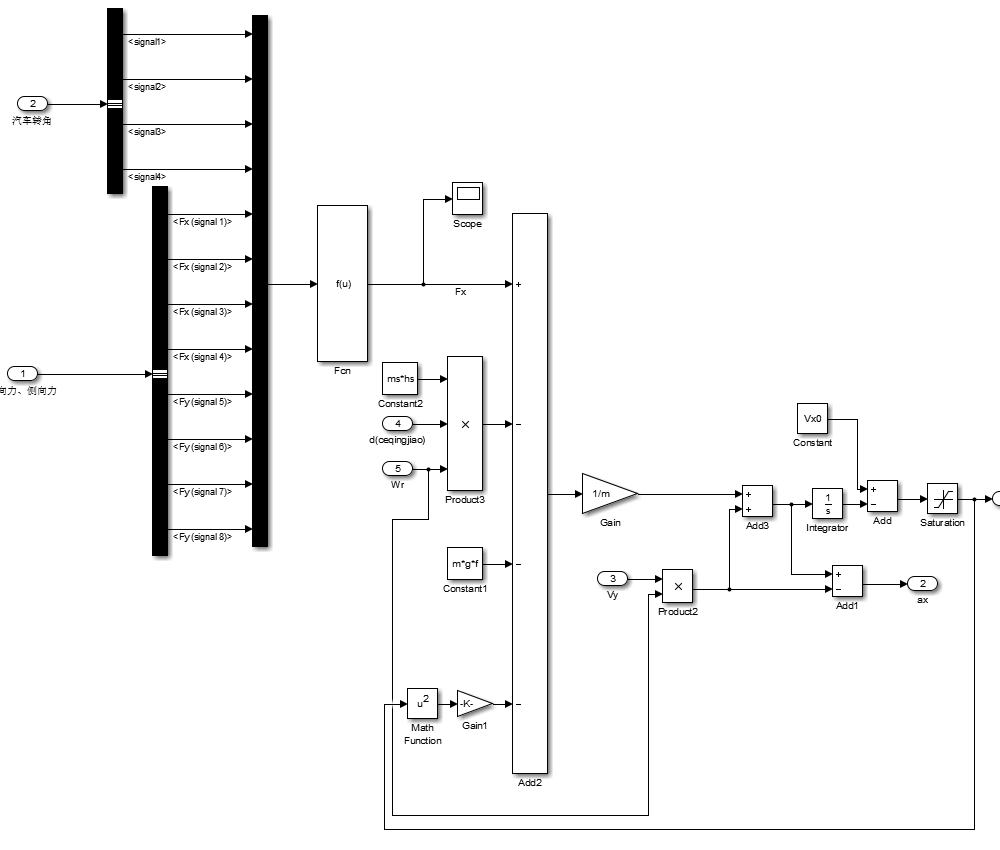
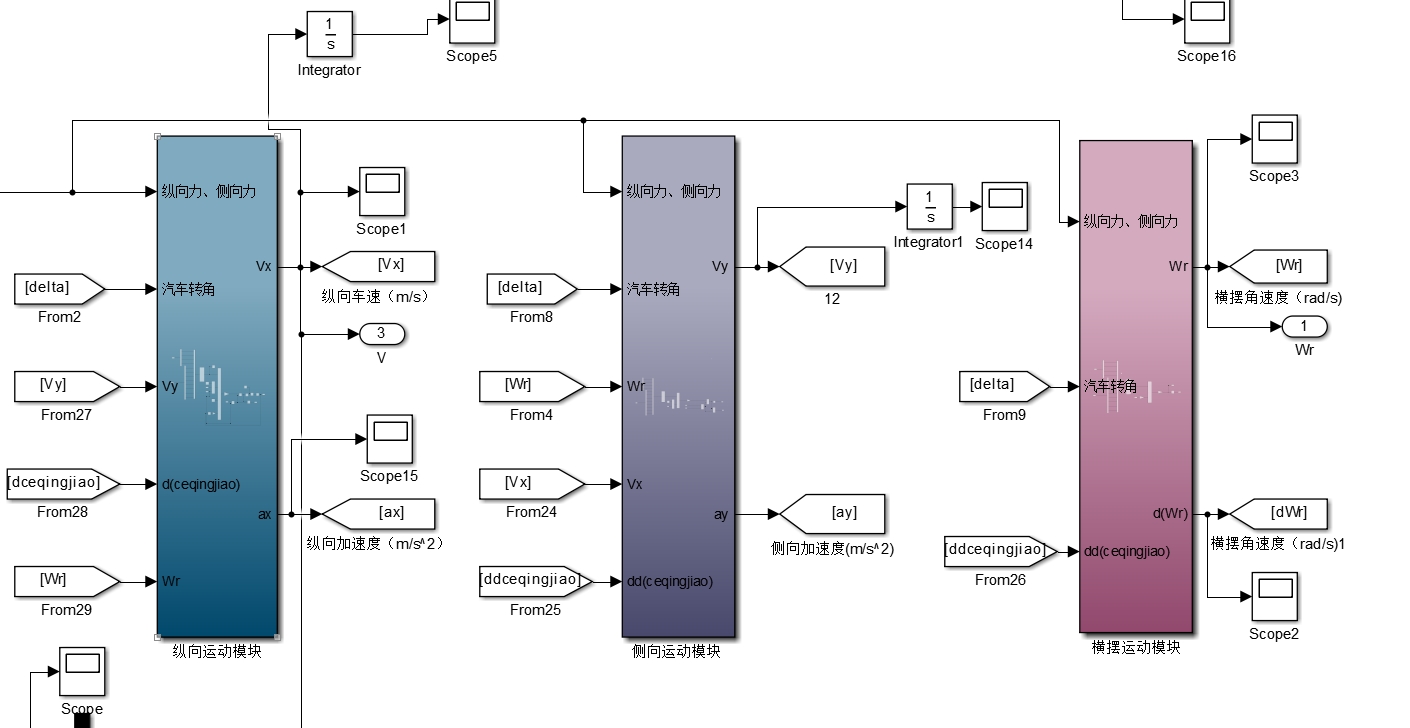
先看底盘骨架怎么搭。方向盘一打轮胎就较劲,车身扭得像麻花,这种拧巴状态得拆成七个维度来看:车体横摆(老司机说的甩尾)、纵向狂奔(推背感来源)、侧向滑移(漂移必备),外加四个轮子各自的旋转戏精。MATLAB/SIMULINK搭建分布式驱动电动汽车模型,七自由度整车模型,包括横摆,纵向,侧向,四个轮胎四个自由度等等,转弯制动工况,包括abs模型。MATLAB/SIMULINK搭建分布式驱动电动汽车模型
MATLAB/SIMULINK搭建分布式驱动电动汽车模型,七自由度整车模型,包括横摆,纵向,侧向,四个轮胎四个自由度等等,转弯制动工况,包括abs模型。 资料详细。
一脚电门踩到底,后视镜里的风景飞速倒退,这辆四轮独立驱动的电驴子正在上演现实版的速度与激情。今天咱们要扒开的可不是改装车引擎盖,而是藏在Simulink里的七自由度电动猛兽——这个能模拟急转弯时ABS疯狂点刹的数字化验尸台。
先看底盘骨架怎么搭。方向盘一打轮胎就较劲,车身扭得像麻花,这种拧巴状态得拆成七个维度来看:车体横摆(老司机说的甩尾)、纵向狂奔(推背感来源)、侧向滑移(漂移必备),外加四个轮子各自的旋转戏精。在Simulink里这些运动方程就像乐高积木,咱们用Vehicle Body模块当底座,接上四个Wheel & Tire模块当四肢。
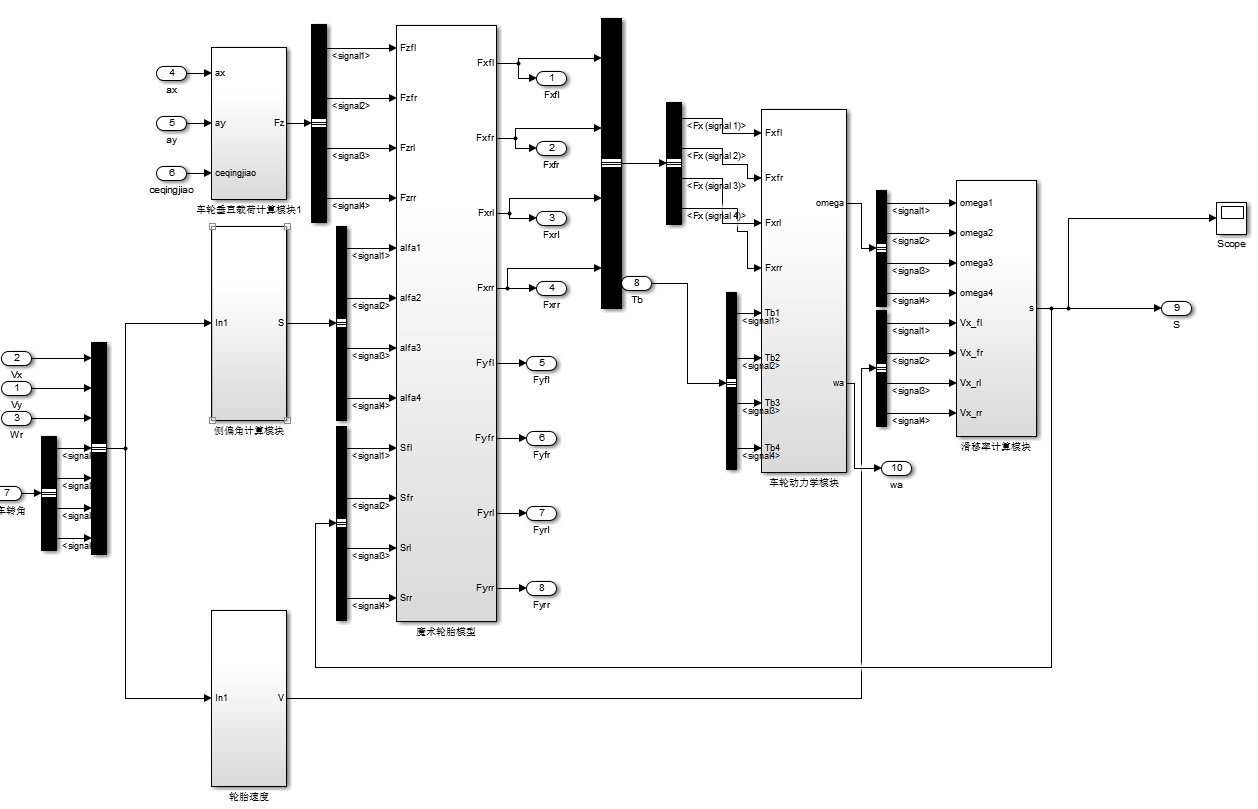
轮胎可不是橡皮擦,魔术公式才是它的真面目。瞅这段轮胎力计算代码:
function [Fx,Fy] = magic_formula(kappa, alpha, Fz)
B = 10*sin(2*pi*Fz/6000); % 载荷越重越抓地
C = 1.3 - Fz*0.0002; % 形状因子偷偷变小
D = Fz*(0.7 + 0.0003*Fz); % 峰值因子在线膨胀
Fx = D*sin(C*atan(B*kappa));
Fy = 0.9*D*sin(C*atan(B*alpha));
end这堆三角函数暗藏玄机——当轮胎打滑率kappa超过0.2时,B参数会让正切函数陡增,导致抓地力断崖下跌,这就是模拟抱死的前戏。注意第5行Fy计算时打了九折,毕竟侧向摩擦总比纵向怂一点。
MATLAB/SIMULINK搭建分布式驱动电动汽车模型,七自由度整车模型,包括横摆,纵向,侧向,四个轮胎四个自由度等等,转弯制动工况,包括abs模型。 资料详细。
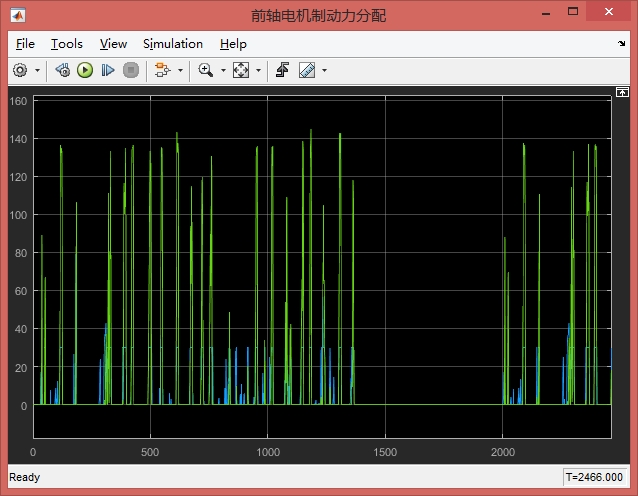
重点来了:分布式驱动意味着每个轮子都是戏精本精。在Brake & Motor子系统里,四个独立PID控制器正在上演宫斗剧:
%% 左前轮扭矩分配逻辑
if abs(yaw_rate_error) > 0.2
left_front_motor_trq = base_trq + yaw_PID*0.7; % 横摆纠偏主力
else
left_front_motor_trq = base_trq * slip_ratio*2; % 常规打滑控制
end这段代码藏着个彩蛋——当车辆横摆角偏差过大时,左前电机会突然加戏成为纠偏主角。但别被0.7的系数骗了,实际调试时会发现这个值超过0.5就容易引发轮胎啸叫,别问我怎么知道的。
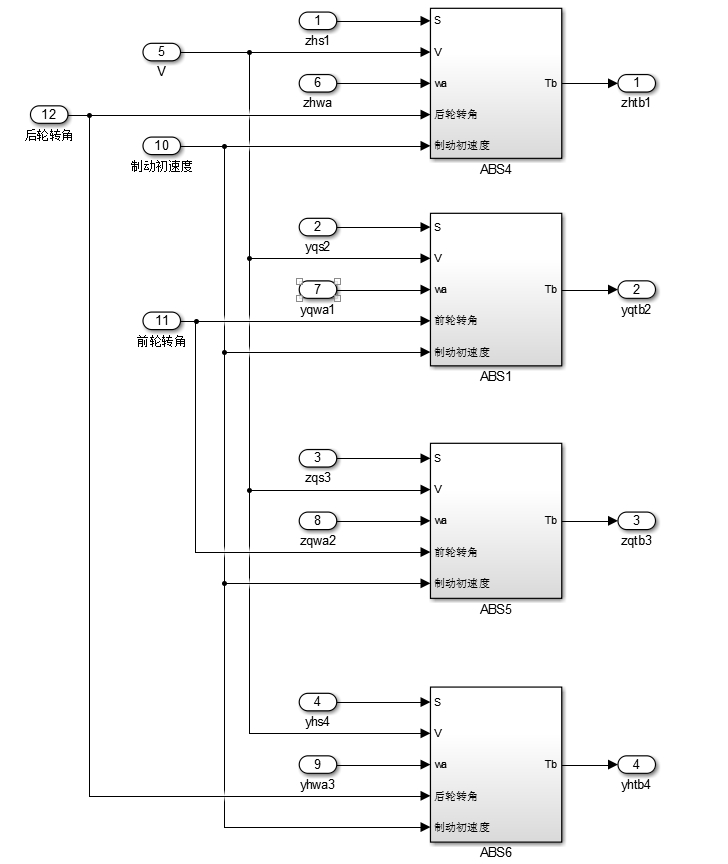
ABS模块才是重头戏,它的工作状态比女朋友的心情还难捉摸。看这个滞回比较器配置:
% ABS触发条件
if (slip_ratio > 0.25 && brake_pedal > 0.4) || ...
(yaw_rate > 6 && steering_angle > 30)
ABS_active = true;
elseif slip_ratio < 0.18 && yaw_rate < 4
ABS_active = false;
end当同时满足刹车踩死和方向盘打死时,ABS会进入狂暴模式。但实测中发现第二个条件里的6deg/s阈值在冰面上得降到3.5,否则车子能给你表演原地转圈。
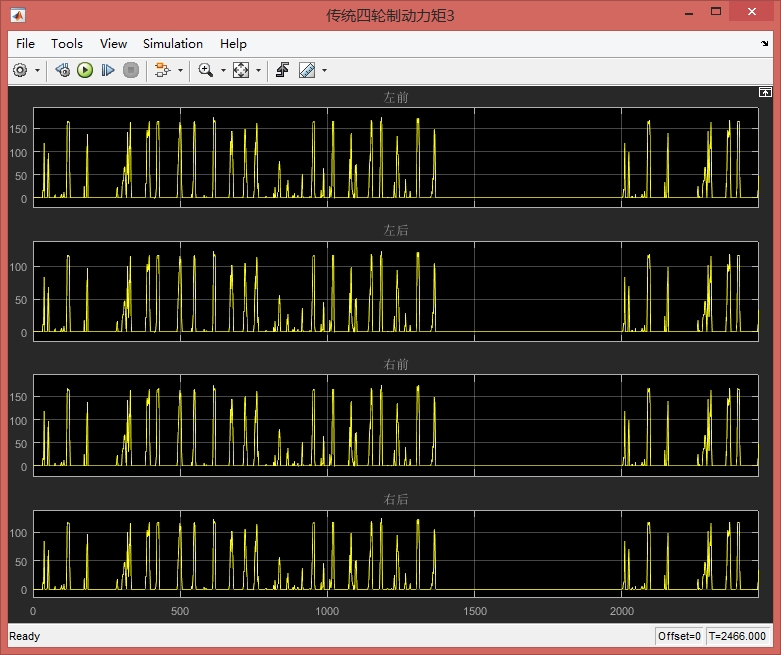
最后上硬菜——联合仿真时看见的魔幻画面:80km/h过直角弯,左后轮压力值突然飙红,ESP马上给右前电机灌了300Nm负扭矩,车身像被无形大手掰正。这时候查看四轮转速信号,会发现内侧轮在0.3秒内经历了加速-制动-再加速的过山车,Simulink的Solve器步长此时必须压到1e-5以下,否则数值震荡能让轮胎温度计算直接爆表。
这模型跑起来后,最惊喜的不是精准复现麋鹿测试,而是发现某个电机过热保护参数设反了——本应限制持续大扭矩输出,结果变成了越热越high的氮气加速模式。所以说建模仿真这事,永远有意料之外的"惊喜"等着你。

开源鸿蒙跨平台开发社区汇聚开发者与厂商,共建“一次开发,多端部署”的开源生态,致力于降低跨端开发门槛,推动万物智联创新。
更多推荐
 7
7 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)