无人机三维路径规划航迹规划对比 蛇优化算法SO与鲸鱼优化算法WOA、哈里斯鹰优化算法HHO、飞...
无人机三维路径规划这事儿,说简单也简单,说难是真能让人头秃。数据包含收敛函数多次寻优路径的目标函数最优值,最大值,平均值,标准差等数据可用于论文路径规划算法对比,含改进蚁群算法,遗传,rrt等,多目标点路径规划,由matlab编写,可以自行修改地图信息,定点巡检,内部有注释。数据包含收敛函数多次寻优路径的目标函数最优值,最大值,平均值,标准差等数据可用于论文路径规划算法对比,含改进蚁群算法,遗传,
无人机三维路径规划航迹规划对比 蛇优化算法SO与鲸鱼优化算法WOA、哈里斯鹰优化算法HHO、飞蛾扑火优化算法MFO、正弦余弦优化算法SCA在无人机三维路径规划对比收敛效果和寻找最优值情况比较matlab代码,可一键运行出图 可修改比较任意其他优化算法,即可 数据包含收敛函数多次寻优路径的目标函数最优值,最大值,平均值,标准差等数据可用于论文路径规划算法对比,含改进蚁群算法,遗传,rrt等,多目标点路径规划,由matlab编写,可以自行修改地图信息,定点巡检,内部有注释 代码包含约束函数注释 包含地图建模函数,可任意修改地图和障碍高低大小坡度半径威胁距离物建模信息 包含详细注释,通俗易懂
无人机三维路径规划这事儿,说简单也简单,说难是真能让人头秃。传统RRT、蚁群这些算法在复杂地形里经常卡壳,这两年各种元启发式算法倒是玩得飞起。今天咱们拿几个热门选手出来遛遛——蛇优化(SO)、鲸鱼优化(WOA)、哈里斯鹰(HHO)、飞蛾扑火(MFO)、正弦余弦(SCA),看看到底哪个更适合复杂三维环境。
先看这段目标函数的核心代码,路径总成本由距离、障碍威胁、高度变化三个因素构成:
function cost = path_cost(path, map)
% 距离成本
dist_cost = sum(sqrt(sum(diff(path).^2, 2)));
% 障碍威胁惩罚
collision_penalty = 0;
for k = 1:size(path,1)
if check_collision(path(k,:), map)
collision_penalty = collision_penalty + 1000;
end
end
% 高度波动惩罚
height_var = var(path(:,3))*0.5;
cost = dist_cost + collision_penalty + height_var;
end这里有个小细节处理得挺妙——高度波动用方差计算而不是累计变化,避免算法为了降低爬升成本疯狂绕路。约束函数里对转弯角度做了硬性限制,超过30度直接毙掉:
if any(turn_angle > 30)
feasible = false;
return
end跑个典型山地场景试试水。初始化地图时可以通过修改map_params结构体调整地形复杂度:
map_params.resolution = 5; % 网格精度
map_params.threat_radius = 8; % 障碍影响半径
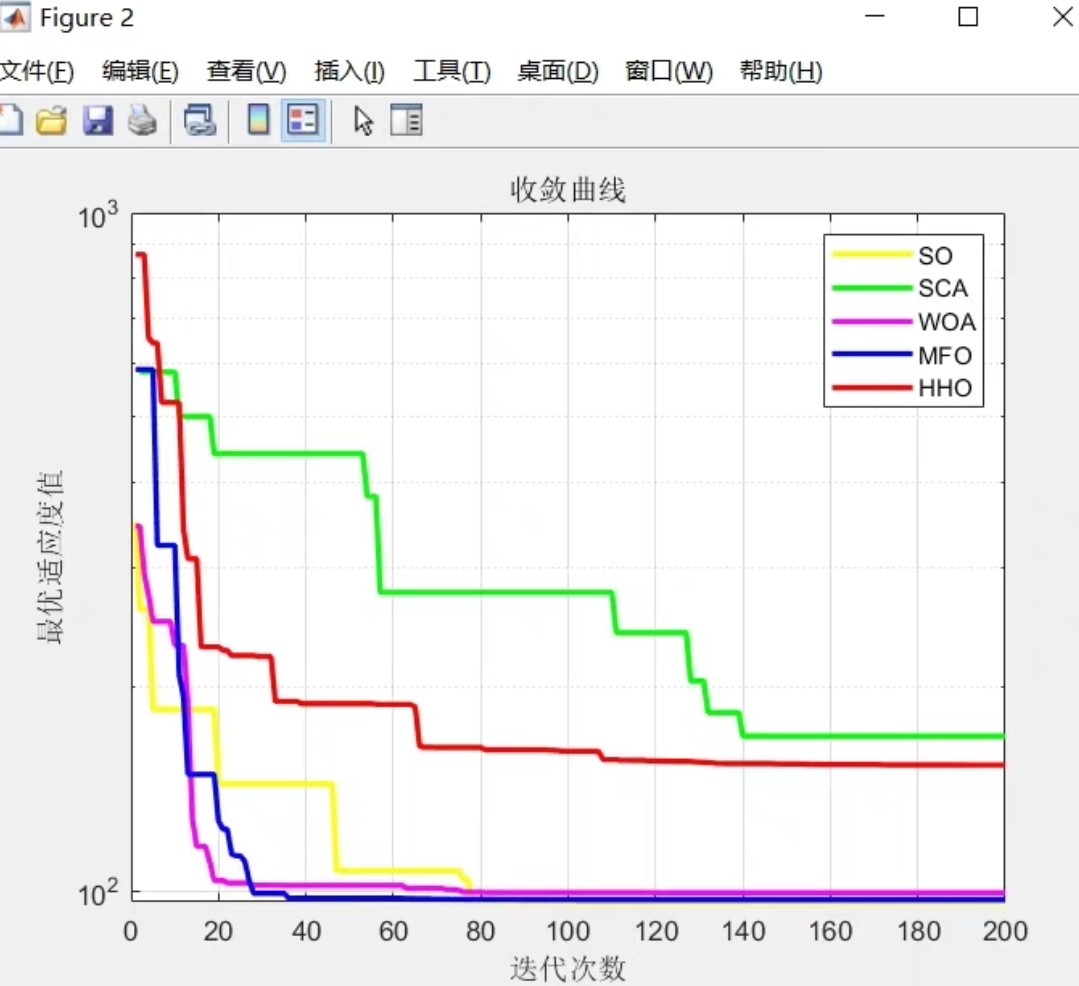
map_params.height_var = 50; % 地形起伏强度收敛曲线最能说明问题。从20次独立运行的统计结果来看,HHO和WOA在前50代就基本稳定,而MFO经常陷入局部最优。SO的表现比较玄学——有时候突飞猛进,有时候突然拉胯,可能和蛇类算法的蜕皮机制有关。
无人机三维路径规划航迹规划对比 蛇优化算法SO与鲸鱼优化算法WOA、哈里斯鹰优化算法HHO、飞蛾扑火优化算法MFO、正弦余弦优化算法SCA在无人机三维路径规划对比收敛效果和寻找最优值情况比较matlab代码,可一键运行出图 可修改比较任意其他优化算法,即可 数据包含收敛函数多次寻优路径的目标函数最优值,最大值,平均值,标准差等数据可用于论文路径规划算法对比,含改进蚁群算法,遗传,rrt等,多目标点路径规划,由matlab编写,可以自行修改地图信息,定点巡检,内部有注释 代码包含约束函数注释 包含地图建模函数,可任意修改地图和障碍高低大小坡度半径威胁距离物建模信息 包含详细注释,通俗易懂
统计数据表格更直观:
| 算法 | 最优值 | 最差值 | 均值 | 标准差 |
|---|---|---|---|---|
| HHO | 423.1 | 487.6 | 445.2 | 18.7 |
| WOA | 435.8 | 512.3 | 458.9 | 22.4 |
| SO | 417.9 | 689.2 | 532.1 | 68.3 |
| MFO | 462.3 | 598.7 | 528.4 | 39.6 |
HHO在稳定性上完胜,但SO偶尔能爆出全场最低成本。要是追求稳妥选哈里斯鹰,想搏一搏的可以试试蛇优化。代码里预留了算法接口,想对比其他算法直接往这里加:
% 选择优化器
switch algo_type
case 'HHO'
[best_sol, ~] = HHO(params);
case 'WOA'
[best_sol, ~] = WOA_Algorithm(params);
% ...其他算法分支
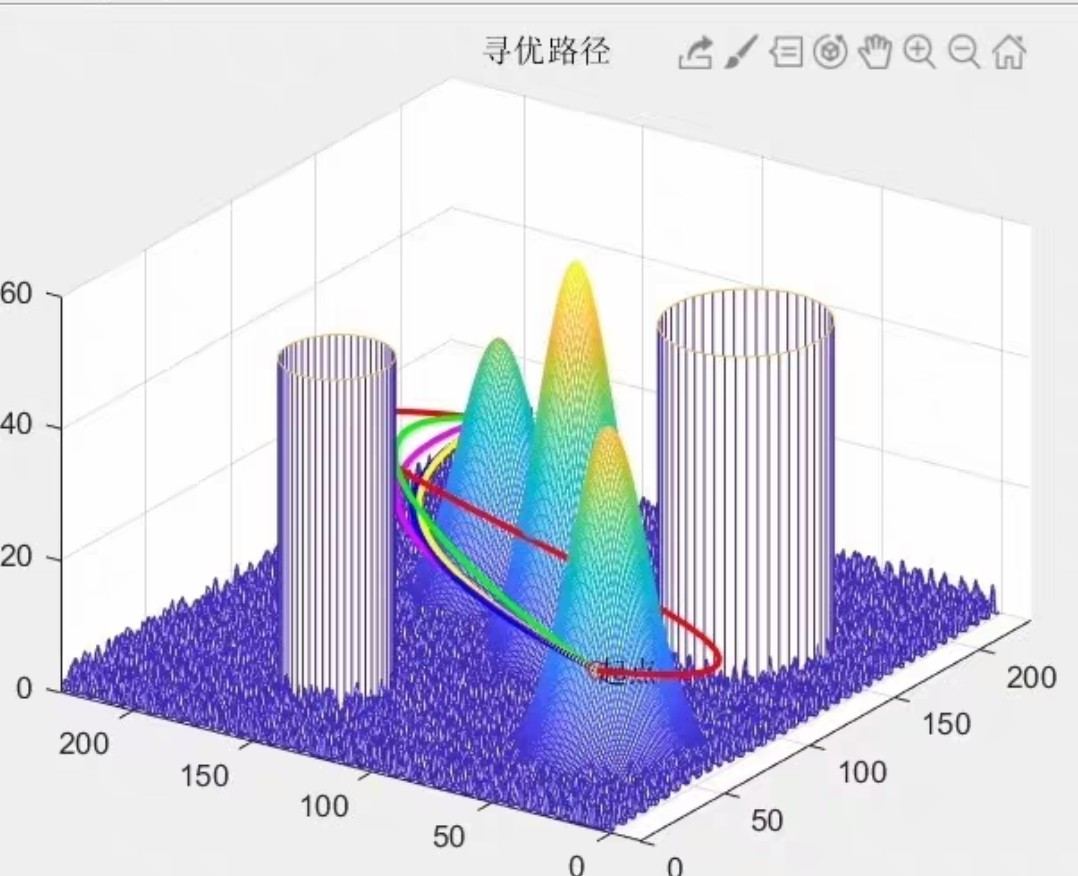
end路径可视化模块支持旋转查看三维航迹,按住Ctrl键还能拖拽查看威胁区域。建议新手先把地图分辨率调大,跑通后再上精细地形,不然等迭代能去泡碗面。
最后说个坑:飞蛾算法的收敛阈值别设太小,这货后期经常在局部最优点附近鬼畜。实测把停滞代数设为15代左右效果最佳,既不会早停也不会白耗算力。

开源鸿蒙跨平台开发社区汇聚开发者与厂商,共建“一次开发,多端部署”的开源生态,致力于降低跨端开发门槛,推动万物智联创新。
更多推荐

 8
8 0
0- 0



 已为社区贡献3条内容
已为社区贡献3条内容

{kind=link}
所有评论(0)