Flutter for OpenHarmony 实战:sensors_plus 传感器融合与 3D 体感交互
本文介绍了如何在Flutter for OpenHarmony中使用sensors_plus插件实现传感器融合与3D体感交互。文章包含三部分实战内容:1) 利用加速度计实现重力小球效果;2) 通过陀螺仪计算手机倾斜角度实现3D视差;3) 使用UserAccelerometerEvent精确识别摇一摇动作。同时提供了鸿蒙环境下的配置指南和常见问题解决方案,强调传感器资源释放的重要性。通过结合Matr
Flutter for OpenHarmony 实战:sensors_plus 传感器融合与 3D 体感交互

前言
手机不仅是一个显示器,它更是分布着数十个“感官”的精密仪器。在 HarmonyOS NEXT 系统中,传感器框架(Sensor Kit)承担了高频率、低功耗的数据分发任务。sensors_plus 插件为开发者提供了一套标准的 Stream 订阅机制,让我们能轻松获取手机的姿态数据。
本文将带你实战传感器融合与响应式体感交互,并提供三个独立的实战页面演示。
一、 工程准备:安装与合规配置
1.1 安装依赖
在鸿蒙 NEXT 上,除了安装通用的 sensors_plus 接口包,还必须安装对应的 sensors_plus_ohos 适配包。
flutter pub add sensors_plus sensors_plus_ohos
1.2 pubspec.yaml 配置
dependencies:
flutter:
sdk: flutter
sensors_plus: ^6.1.1 # 💡 核心接口包
sensors_plus_ohos: ^0.1.2 # 💡 鸿蒙 NEXT 原生适配包
1.3 权限配置 (module.json5)
如果你的应用需要后台计步或高频运动感知,在鸿蒙 API 12+ 以后,建议在 module.json5 申请相关权限。对于基础的前台传感器监听,通常无需特殊权限,但如果涉及健康数据,请添加:
"requestPermissions": [
{ "name": "ohos.permission.ACCELEROMETER" }, // 💡 加速度计权限
{ "name": "ohos.permission.GYROSCOPE" }, // 💡 陀螺仪权限
{ "name": "ohos.permission.ACTIVITY_MOTION" } // 💡 运动传感器权限 (非必须,建议添加)
]
二、 实战 01:重力感应 (Accelerometer)
加速度计是最基础的传感器,它能告诉我们手机在 X, Y, Z 三个轴向上的受力情况。
核心逻辑 (accelerometer_page.dart)
我们通过监听 accelerometerEvents 并将数值映射到 UI 坐标,实现一个“重力小球”效果:
// 💡 订阅加速度事件
_subscription = accelerometerEvents.listen((AccelerometerEvent event) {
setState(() {
// 映射为屏幕偏移量
xOffset = event.x * 15;
yOffset = event.y * 15;
});
});
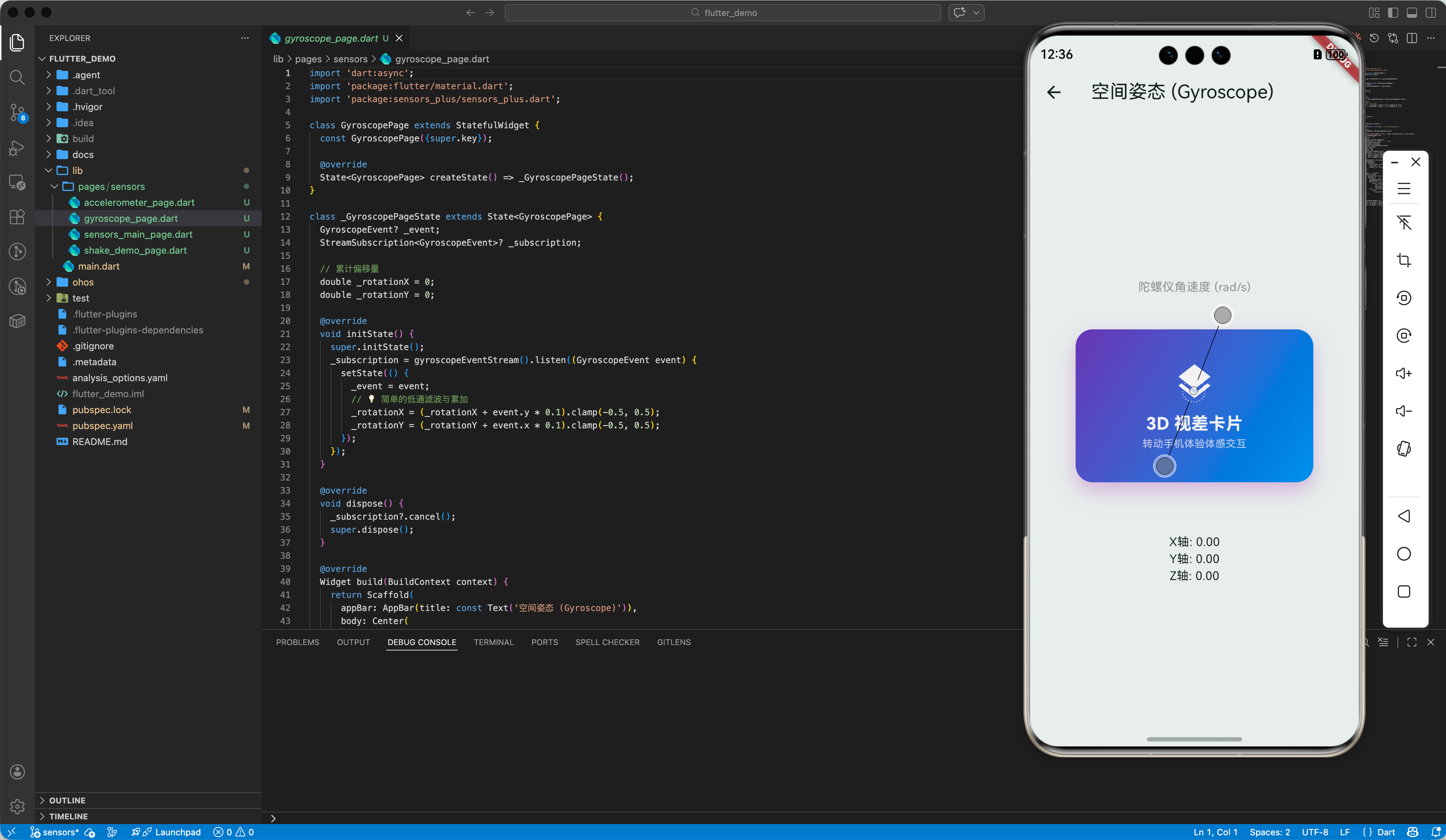
三、 实战 02:空间姿态 (Gyroscope)
陀螺仪测量的是角速度(rad/s)。它是实现 3D 视差效果 和 VR 头部追踪 的核心。
核心逻辑 (gyroscope_page.dart)
通过对角速度进行简单的低通滤波和累加,我们可以计算出手机当前的倾斜角度,并将其应用到 Transform 矩阵中:
Transform(
transform: Matrix4.identity()
..setEntry(3, 2, 0.001) // 增加透视感
..rotateX(_rotationY)
..rotateY(_rotationX),
child: MyCard(),
)
四、 实战 03:摇一摇识别 (UserAccelerometer)
简单的加速度判断容易产生误检。我们使用 UserAccelerometerEvent(已由鸿蒙底层剔除重力影响),通过计算三轴向量模长来实现精确的摇一摇识别。
核心逻辑 (shake_demo_page.dart)
userAccelerometerEvents.listen((UserAccelerometerEvent event) {
// 💡 计算瞬时加速度模长:sqrt(x² + y² + z²)
double acceleration = sqrt(event.x * event.x + event.y * event.y + event.z * event.z);
if (acceleration > 12) { // 阈值判定
_onShakeDetected(); // 执行摇一摇业务
}
});
五、 鸿蒙环境下的避坑指南 (FAQ)
5.1 模拟器无法获取数据?
现象:在模拟器上运行,重力球不动或摇一摇没反应。
解析:
- 重力/陀螺仪:需点击模拟器工具栏的 “Sensors”,手动拖动滑块模拟变化。
- 摇一摇:模拟器的“摇一摇”功能往往不产生物理加速度流。
实战对策:在本示例代码中,我们为中间的“手机图标”增加了点击监听。在模拟器上,你只需点击图标即可模拟触发一次摇动逻辑。
5.2 资源释放的重要性
⚠️ 警告:传感器监听是极高频的操作。务必在 dispose 中取消订阅,否则系统传感器通道会持续占用,导致手机发热且耗电量激增。
void dispose() {
_subscription?.cancel(); // ✅ 必须手动释放
super.dispose();
}
六、 总结
sensors_plus 让 Flutter 应用拥有了感知物理世界的能力。在鸿蒙 NEXT 上,结合 Matrix4 变换 和 向量计算,你可以创造出极具沉浸感的“重力感” UI。
欢迎加入开源鸿蒙跨平台社区:开源鸿蒙跨平台开发者社区

开源鸿蒙跨平台开发社区汇聚开发者与厂商,共建“一次开发,多端部署”的开源生态,致力于降低跨端开发门槛,推动万物智联创新。
更多推荐


 19
19 0
0- 0



 已为社区贡献23条内容
已为社区贡献23条内容

所有评论(0)